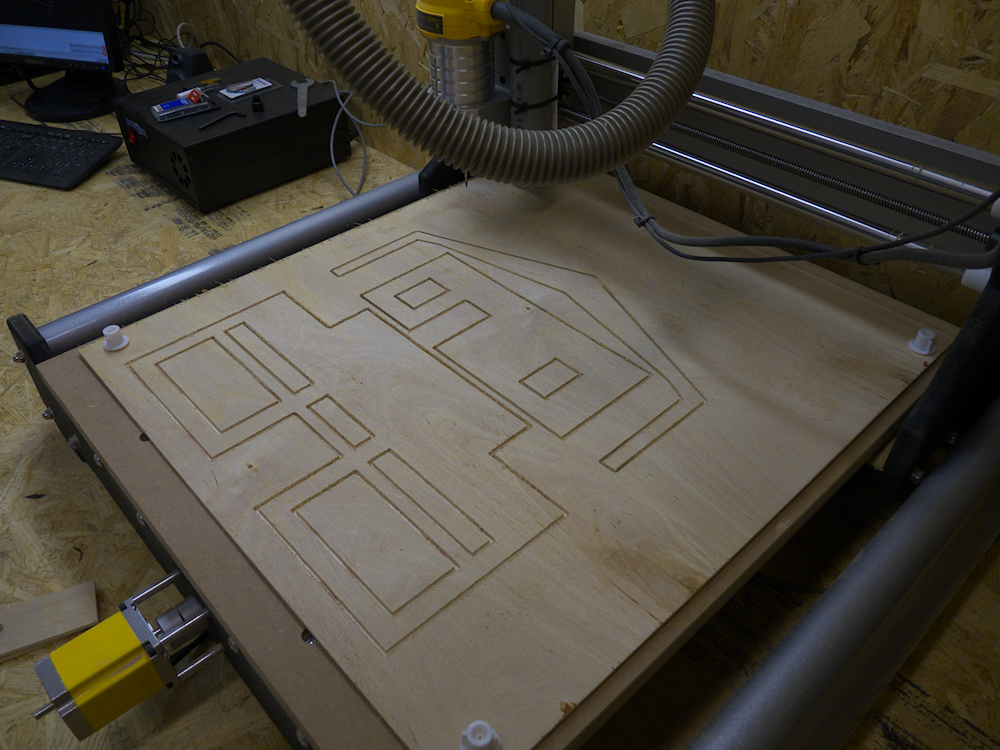
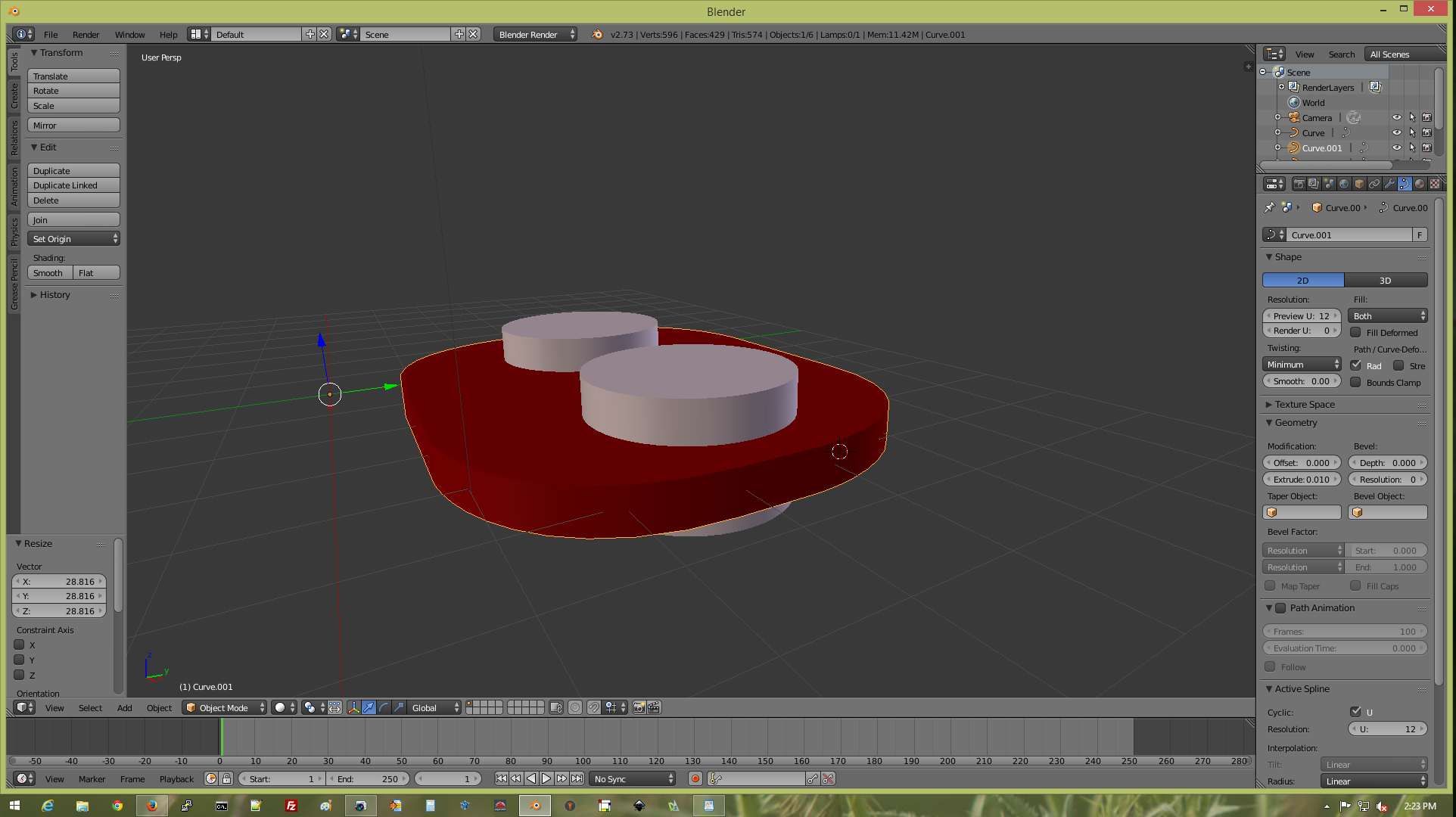
Man, my o-flute-upcut carbide bit does some clean work on .125 inch styrene! This is the design from a few posts down, cut out with the CNC. A waterproof R/C servo provides the automation. The arm has one super magnet, the wheel on the servo has two. The idea here is that you can throw the lever manually to control a turnout but that it also remains at all times under control of the computer.
That’s the plan anyhow. The magnets are those little really powerful ones. They act like a ‘clutch’ in this situation. So far it works on the bench but the real world is another story, I’m not quite there yet. I need to install them on my three turnouts and stick them out in the cold rain for some testing.