
Finally shelled out a few dollars and got a brand new rig.
Intel Core i5-11600KF @ 3.90GHz 3.91 GHz
Installed RAM 16.0 GB
GEForce RTX 3060
Really nice box. Runs Unreal Engine 5 great but it turns the computer into a space heater when it does.
Finally shelled out a few dollars and got a brand new rig.
Intel Core i5-11600KF @ 3.90GHz 3.91 GHz
Installed RAM 16.0 GB
GEForce RTX 3060
Really nice box. Runs Unreal Engine 5 great but it turns the computer into a space heater when it does.

I’m finally getting the hang of my new 3D printer, a Creality Halot One Resin printer. Resin is a bit messy but not too bad and doesn’t smell near as bad as everyone lets on in the Youtube videos. In fact, with the top on, it’s barely noticeable. Anyhow, here is my preacher man, intended for the Country Church I made earlier this year. He is painted with acrylic with just a tad of dish soap mixed in to thin the paint. For some reason, that makes the paint stick really well, I don’t need a primer on these. Anyhow, I am working on more folks for his ‘flock’. This guy (and his future parishioners) were (will be) made with MakeHuman and and then edited in Blender. Blender 3.0 is quite powerful, I wonder how it remains free. Lots of new features and refinements with the 3.0 release, lots of fun when you have to stay inside all the time because of the weather.
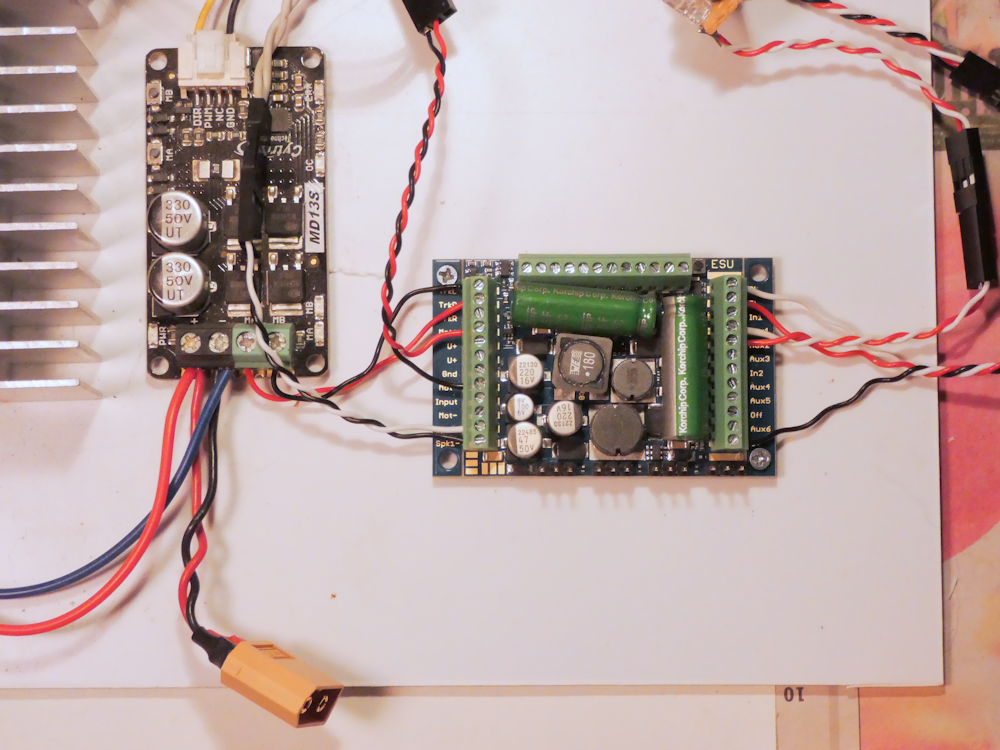
I finally got my hands on a ESU LokSound 5XL large scale decoder for testing. So far, it works fine with my receiver, no issues.
Many people rave about the ESU Lok series, but I really don’t see why. It costs about $30 more than it’s competitors, the TCS 501 and the Soundtraxx TSU4400 and it has to be programmed before it will make any sounds. To program it you need a $130 unit unless you get it pre-programmed by the retailer. Physically, the board is ok, a bit wider than the other but not bad. The screw terminals are kinda small, I just did have a screwdriver that would fit. On the plus side, the sound is quite good, motor control is smooth and it has many many programming options. It will also support 4 servos if you need something physical.
https://larryhanlon.smugmug.com/Trains/Model-Sound/SP-3010-SoundThrottle-XL-test-3-7-21/

Driving a very large model train with my Protothrottle Receiver.

I accidentally ordered a roll of ABS filament (I had been using PLA) so that forced me to do a bit of tweaking on my 3d printer. Tried the glass bed with it, didn’t work very well. Ended up going back to the regular one but I don’t use painters tape anymore, just print right on the bed. Everything sticks fine although I’m not sure I like ABS for people. Anyhow, I have been meaning to post files of my people if anyone wants to play with them or 3d print. I use Makehuman to create them, Blender to pose em, Netfabb to seal the ‘holes’ and Cura to slice them for my Creality Ender 3. Almost all of these files are originals but I may have a few things I downloaded from thingiverse.com or something like that in there, they are just dumps of my 3d folders.
There are two zips, one has the blender files which are the ‘source’ files. You can load these into Blender and pose and sculpt them in various ways, then export them into stl or obj files for printing, that file is here:
The other one has already processed files, exported from blender ready to be loaded into a slicer for 3d printing. That zip is here:

My current setup. Left to right. CHG computer, RaspberryPi development, ProxMox VE (repurposed PowerEdge), Windows 10 Fileserver, Ubuntu/Ansible box, printer, Windows 10 main machine, Solder/Lab area for model train controls, Ender3 3D printer.

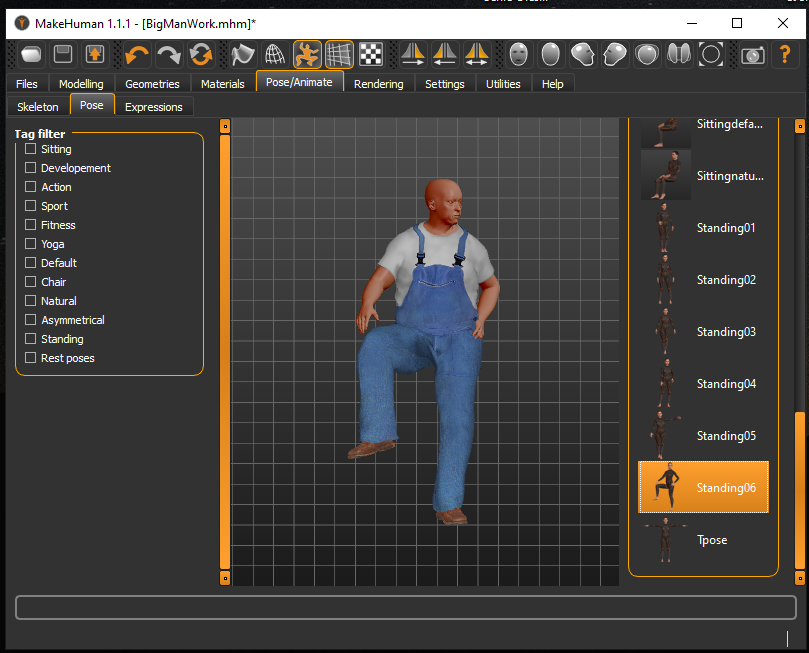
Here is a guy I made in MakeHuman and edited in Blender. He came out quite well and I only had to do minimal changes in blender for the pose. Just adjusted his hands a bit so that they would be flat against his leg and sides. Of course, as usual, you have to edit the head mesh to remove the eye sockets and mouth but using the hide and then ‘select loop’ tool it’s actually pretty quick.
I have zipped up the final OBJ file (obj was a bit smaller than an STL) and uploaded it here: http://martinsant.net/new3d/
This mesh has been tweaked and run through netfabb to remove any holes or openings in the pants and sleeves, etc. I am not sure of the exact scale of the object but I just resize in Cura before I print it. For 1/29 GScale, he is 60mm tall which comes out to about 5 feet 11 inches or so.



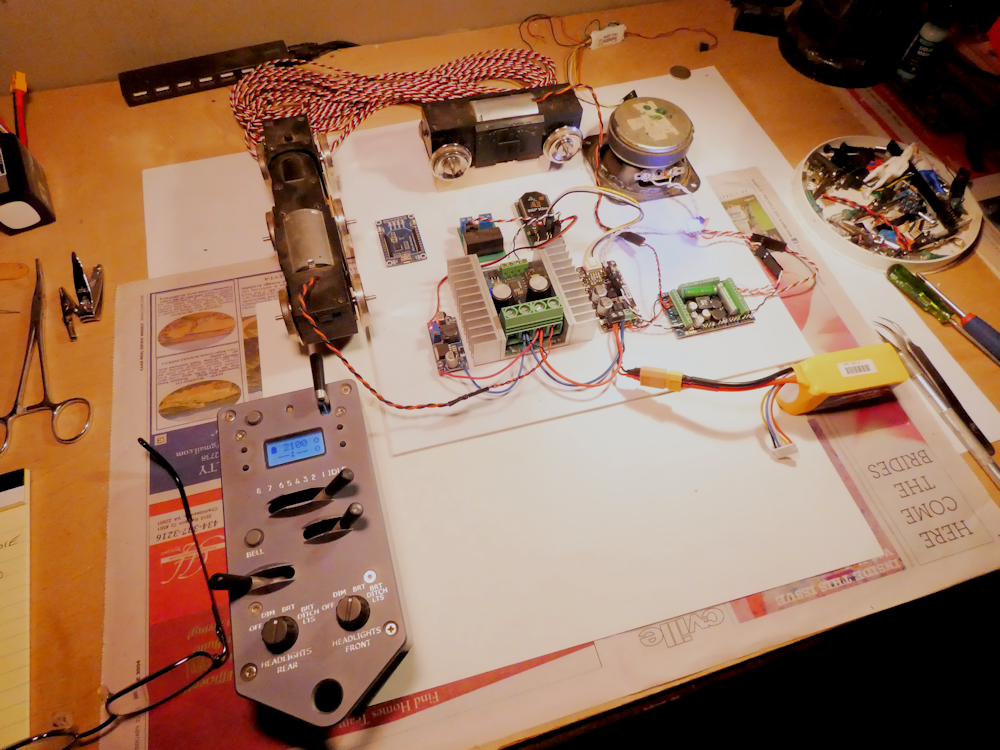
Finally got all the parts happy together. Ended up with a combination of several components I had not tried before- a Pololu 18v7 motor controller plus a relay for the lights. I had to add some code to the PT receiver but I think I will keep that as a configurable option from now on. I tried to use an old soundraxx sierra board but it just didn’t work very well. So I also added an old soundtraxx tsunami which gives the ooh-gah sound but unfortunately only diesel locomotive prime mover sounds. The speaker is a tiny 2 inch visaton-frws-5-r-2-fullrange-speaker, but it sounds pretty good.

Doing a little running outside today, it was a nice day. My layout is a bit thin, needs some ballast and maintenance, it’s been a tough weather season this year, I have not kept up.
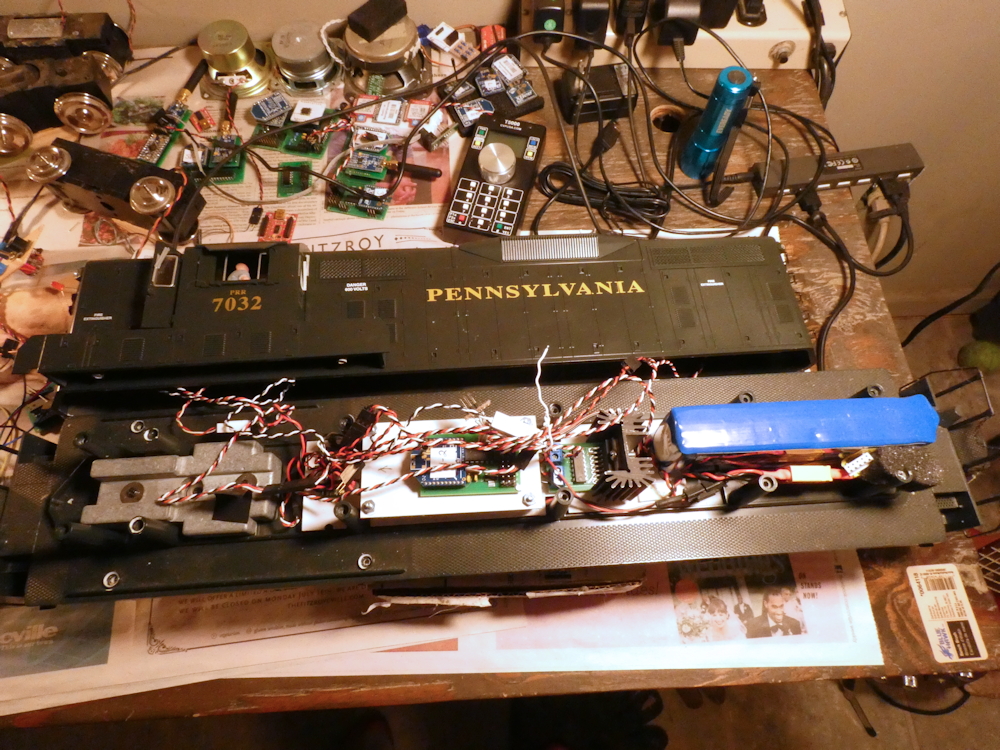
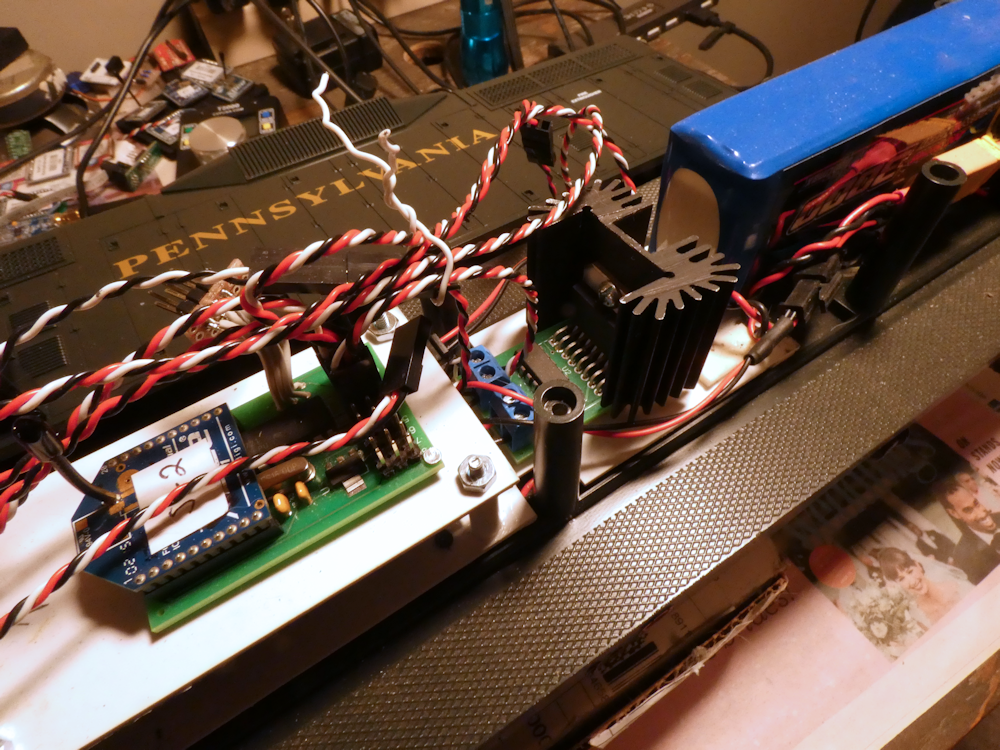
So here are the insides. I like that it’s all self contained, no track power- 3000mah LiPo prime mover, the 5A power amplifier with the big heatsink drives the TCSWow. (You can’t see it here, its underneath the Xbee Receiver)
My receiver board has a standard Xbee sort of foot print for the network chip, it’s what I originally designed it for. Lately I have had a Bluetooth compatible radio chip in it so I could drive my trains with my Android Phone. I swapped that out with an Xbee Series 1 so it would get the Protothrottle network traffic. I coded up some new firmware for the receiver and flashed it into my USAT PRR GP9. Worked really well. I think I have most of the bugs worked out, just needs a bit of tweaking.
I changed the brake on the protothrottle to ‘pulsed’ on F7 for the TCSWow and it works great. I love that brake squeal. I still have lots to do here, the decoder is still ‘out of the box’ I have not tweaked it much at all. I want to configure it with my smart phone, I don’t like the ‘audio assist’ thing much- I have some of that code built out but it will take a while to get it going.


Latest incarnation of the Phone Throttle Contraption. The phone communicates with the Xbee Controller via bluetooth, a custom app runs on the phone. This is based on previous experiments with an android tablet, you can read about that here- Android, Bluetooth and Xbee
I’m trying to emulate a generic sort of DCC throttle ‘feel’ with this. I have all of the base code written and tested, it’s just a matter of pulling all the parts together. Slowly I’m getting everything working.