

Finally got the deck/porch built up and stained. Also constructed the main shelf. This will come out at some point when I insulate the shell and put up wall board but for now it will do fine.
Finally got the deck/porch built up and stained. Also constructed the main shelf. This will come out at some point when I insulate the shell and put up wall board but for now it will do fine.

A very nice shot by CFC of my airplane at one end of the rainbow. I think I need to get out and fly more. I’ve been pretty slack the last few years.

So here is the chicken crew. Mostly full grown. Two Roosters and 12 Hens. Have had no fox problems since I ringed the bottom of the pen with an electric fence. Should get about a dozen eggs every other day or so with all these.

Sophie is the Alpha Dog now. She 18 months old or so and good lord does she have energy.

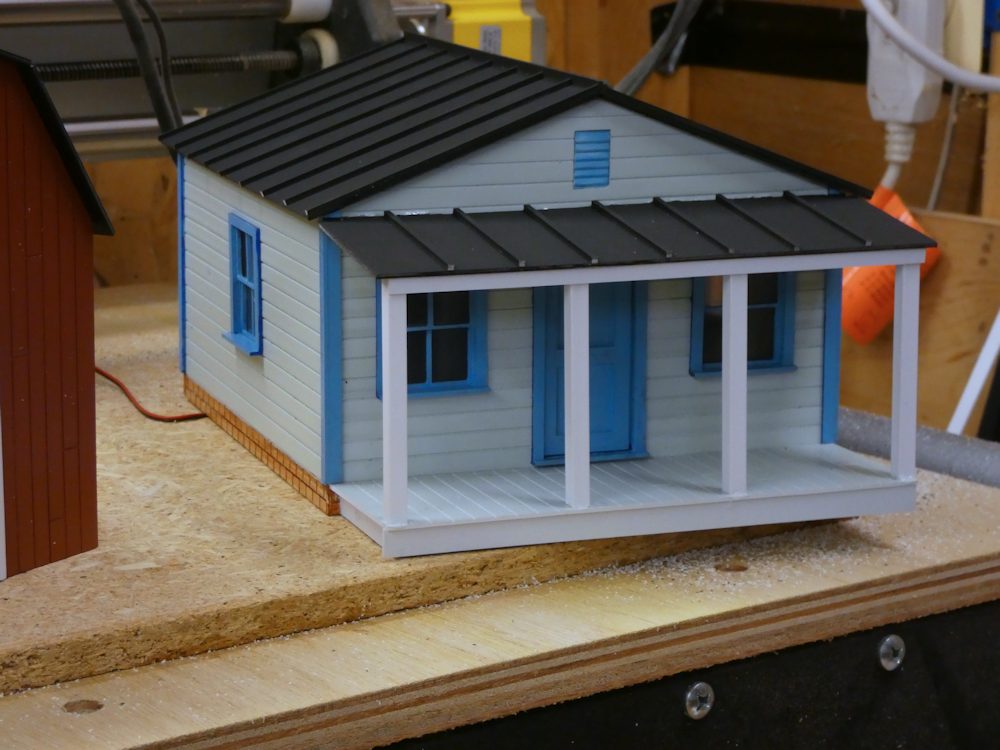

Finished (more or less) my farmhouse cottage and a small barn. These will go into the Burnley area on my layout. The Barn needs some outside lighting and a few details, the house is all wired up but needs to have the windows frosted.

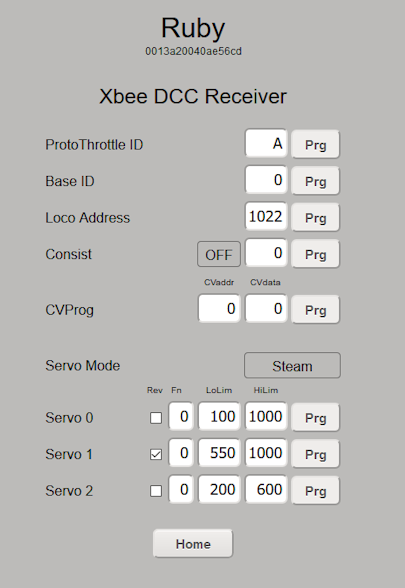
I did some more work on my servo controls for the Protothrottle over the holidays. I wanted to fine tune the live steam mode a bit more and clean up a few bugs. There are three servo modes- couplers, ESC and Steam. In the Steam Mode, Channel 0 is the throttle, Channel 1 is the direction. Both of these follow the direction and throttle controls on the PT. You can adjust high and low limits and reverse each servo. Here is a screen shot of my programmer:
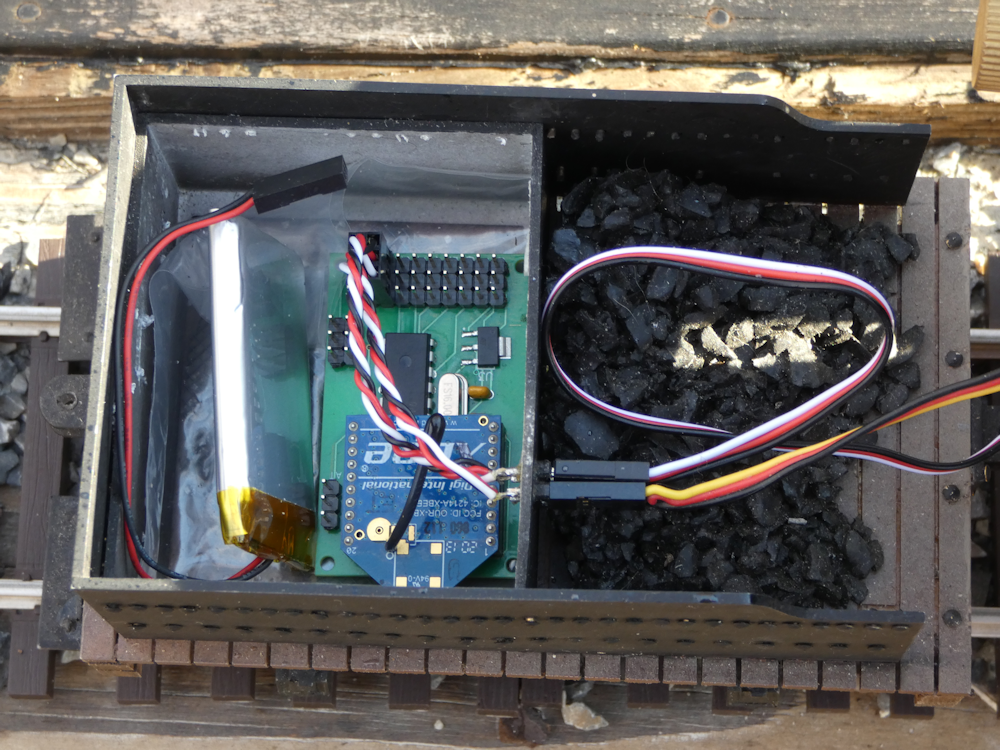
The electronics are very simple, one board and a 3.7v lipo.
Here is a quick video of the servos on the bench:
Here it is fired up and running outside:
And a video of a complete run around the layout loop:



Finally got all the parts happy together. Ended up with a combination of several components I had not tried before- a Pololu 18v7 motor controller plus a relay for the lights. I had to add some code to the PT receiver but I think I will keep that as a configurable option from now on. I tried to use an old soundraxx sierra board but it just didn’t work very well. So I also added an old soundtraxx tsunami which gives the ooh-gah sound but unfortunately only diesel locomotive prime mover sounds. The speaker is a tiny 2 inch visaton-frws-5-r-2-fullrange-speaker, but it sounds pretty good.



Picked up a used rail truck for $75. Nice little fellow, all metal. Looks like it was modified by the previous owner to look like one of the old ‘goose’ rail cars from the 20s. I think that’s a bit of an overkill so I took it all apart down to the motor and cut out a new back end from sheet styrene.



I’ve been working on some repaints and touch up for my growing fleet of used locomotives. First shot is an old Aristo F1 unit. It started out as a Southern Pacific, I disassembled it down the the gears and stripped the paint off the shells. Did the same with a B unit (it used to NH paint)
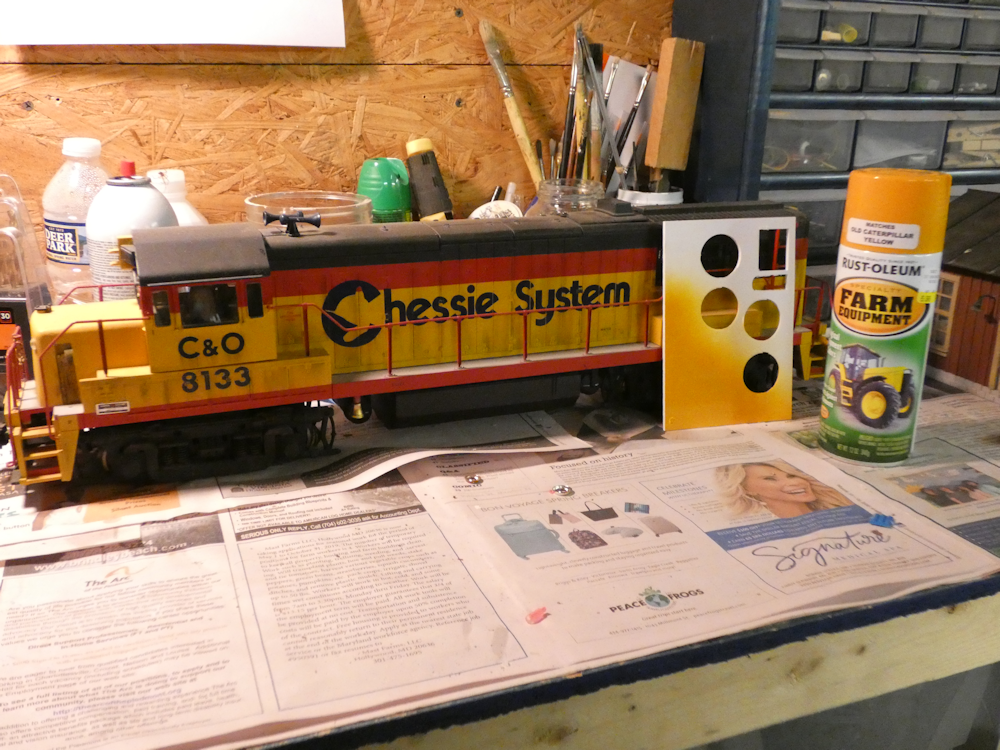
I’m trying to get at least close with this paint scheme on the cab units and the Chessie scheme of mostly orang-ey kinda of yellow on the others. I also like the all blue with yellow letters like this S4 scheme. I have an S4 new in the box but that is a future project.
For the paint, I am a rattle can sort of person so a quick trip to Lowes got me very close I think. Here is a list of what I’m using:
| Strip | 91% ISO alcohol in a very big plastic bin |
| Primer | Rusoleum Universal Grey |
| Yellow Nose Paint | Krylon Gloss Sun Yellow |
| Light Blue | Krylon Matte Vintage Blue |
| Dark Blue | Krylon Satin Oxford Blue |
| Chessie Yellow | Rustoleum Caterpillar Yellow |
| Flat Black | Krylon Flat Black |







Finally finished. Well, more or less. Needs a bit more stain on the back and a porch. That’s later. For now, all the junk in my main Shop is going to go in here, then I’m going to do a deep clean on the Shop, then by spring, this will become the train display/storage/staging shed.