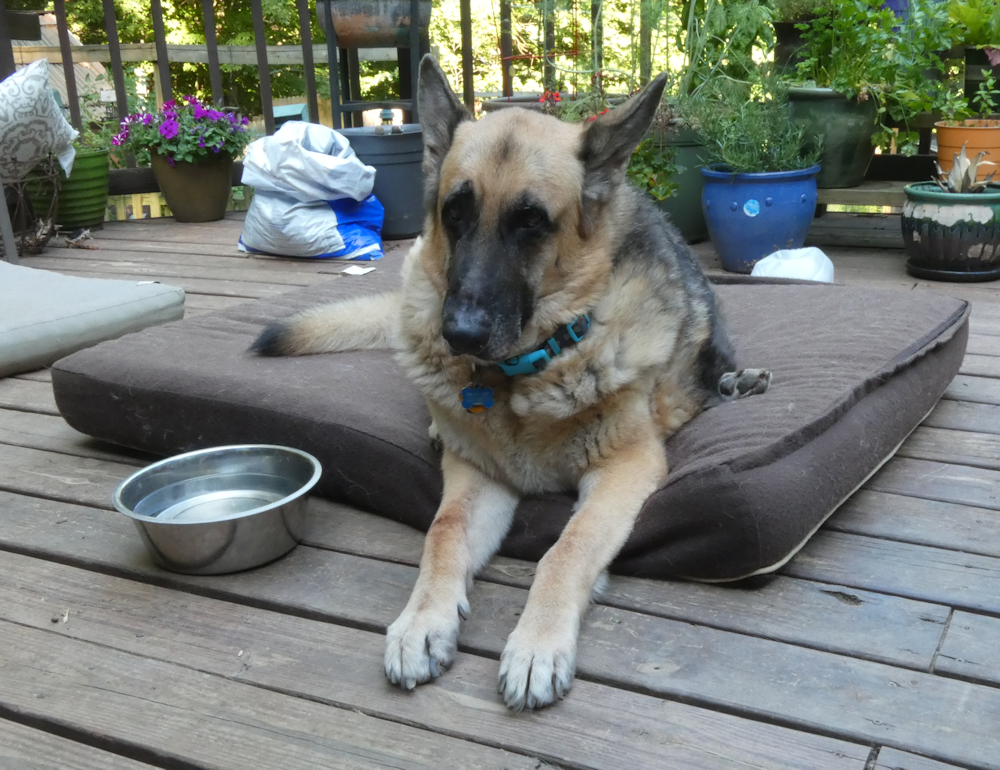
Zack, our big dog, has heart disease. He is under the care of a specialist in Richmond and is now on 4 heart meds. It’s going to shorten his life but we are not quite sure by how much. He’s doing quite well so far, the meds perked him right up and he is (more or less) back to his old self. With any luck we can keep it in check and since he is not a real active fellow anyhow, we are hoping for the best.
(Update: Zack passed away at the end of October 2019. We miss him.)