Building a turnout. Something different.
Thanks to a post on the largescalecentral forum by Bob Hyman, I found this site: handlaidtrack.com
You can download scale pdfs of various turnouts, crossings and other track stuff. By sizing that up by 280%, you get G scale turnout plans! Very cool.
Here is how I have gotten it to work. First, you need to download a free drawing program called InkScape. You can find it HERE
You will also need another program to chop up the finished file into letter page sized printable ‘parts’. It’s called ‘posterrazor’ and you can get it HERE.
Once you have these installed, open inkscape and choose ‘import’ from the file menu. Find your pdf (that you downloaded from handlaidtrack.com) and select that to import. Takes a bit, InkScape isn’t a speed demon.
Once it’s imported, go to Object->Transform. It should look like this:
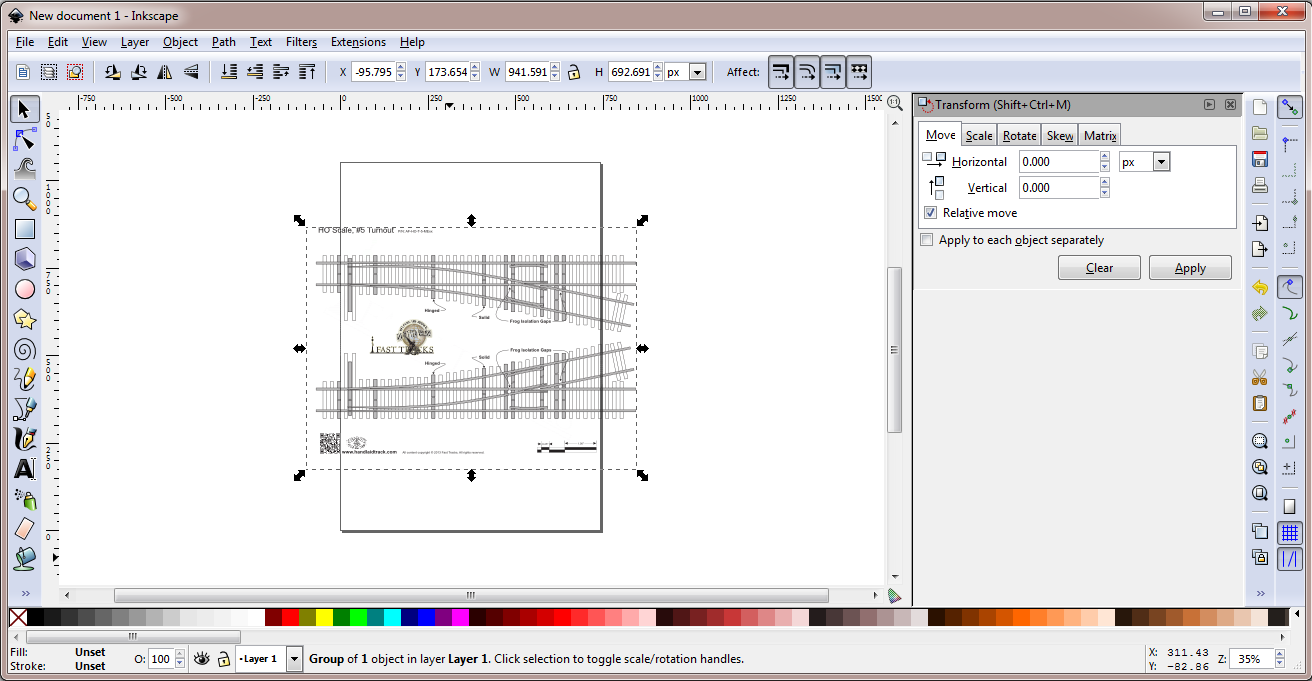
Click on the ‘scale’ tab at the top of the window to the right and then click ‘scale proportionally’. Change the width and height to 280 percent (It should be 300 strictly speaking but I’ve found that’s off just a bit so I use 280 instead). Click ‘Apply’ and the image will be resized. At this point, click the little selection on the right that has a percent in it (%) and change it to px so you know the dimensions of the image.
Now go to the file menu again and this time choose ‘export bitmap’. In the ‘Bitmap size’ area, enter the sizes from the step above. Choose an appropriate destination and file name and click ‘export’. I always use the ‘png’ format although I assume bmp would work as well.
Now open up the other program ‘posterrazor’. Load the png you exported in the above step into posterrazor. It should look like this:
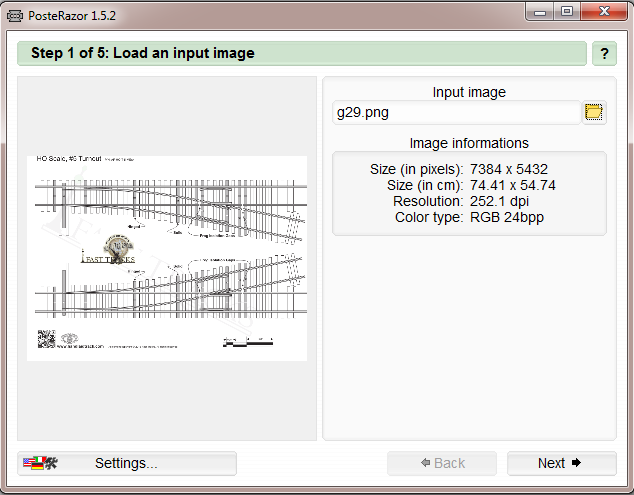
Click next and select ‘letter’ for the paper size and ‘landscape’ for the orientation. Click ‘next’ and just take the defaults presented there. Click ‘next’ again and select ‘size in percent’ and make sure that is set to 100% This should show you an image of how the large image will be broken up into several (many!) sheets of standard printer paper. Click next again and then click the little button under ‘save the poster’ This will create a new PDF sectioned off into the pages you need to print and then tape together to get a complete, full sized plan.
Note that for some of the pdfs on the handlaidtrack site, they are broken up into sheets already. You will have to load each of these sheets into inkscape and process each one like this to get a complete plan.
Also, I just print ONE page to test to make sure that the guage is correct before I print out the whole thing.