Here is a refactor of my rail editor experiments to make a more generic control interface for my wireless servo widgets. This one is ‘uncompiled’ (if that’s a word) so you can take a look at the source if you like. It’s mostly javascript controlling the html5 canvas with some PHP thrown in to do the file save/load. I’ve tried to make it relatively easy to modify so you can add your own tiles and symbols. Note that this is not meant to be a session based editing tool, it saves one file and is meant to do realtime control on a closed web system with tornado (Raspberry Pi)- so don’t try to hack on my server please. (note: I’ve disabled file saving and there is no tornado web socket server on this box so you will see some errors in the web console if you try that)
You can try out the actual program by clicking ON THIS LINK
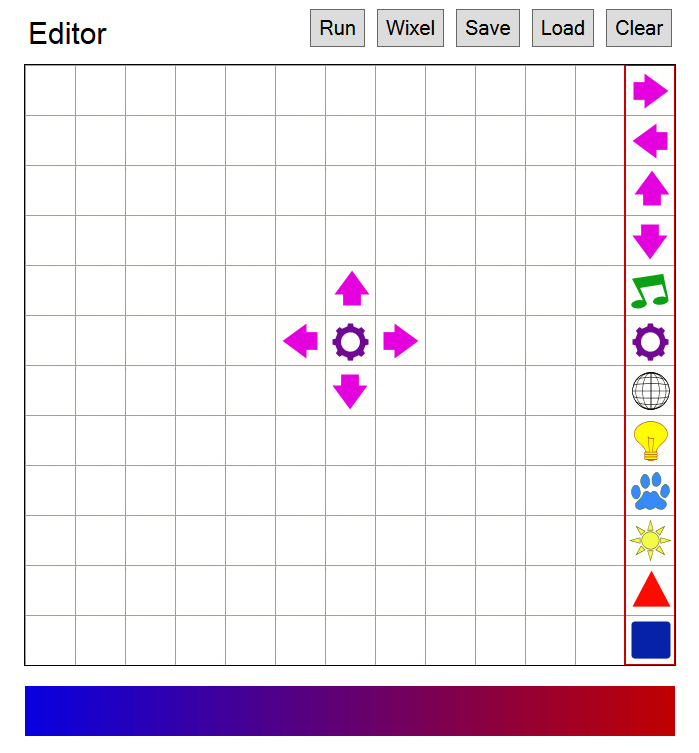
To use this, click a symbol from the palette on the right and then click where you want that symbol to be placed. To erase a symbol, left click on that spot. Since this is meant to be a control surface for a real time web implementation, the ‘wixel’ button at the top is used to set the number of the slave widget (0-63) and the r/c servo that widget controls (0-5). Note this is not implemented completely in this demo, however I will be using the tornado code base I’ve posted in my other posts here, realtime control of servos, see the side bar for a link to that post.