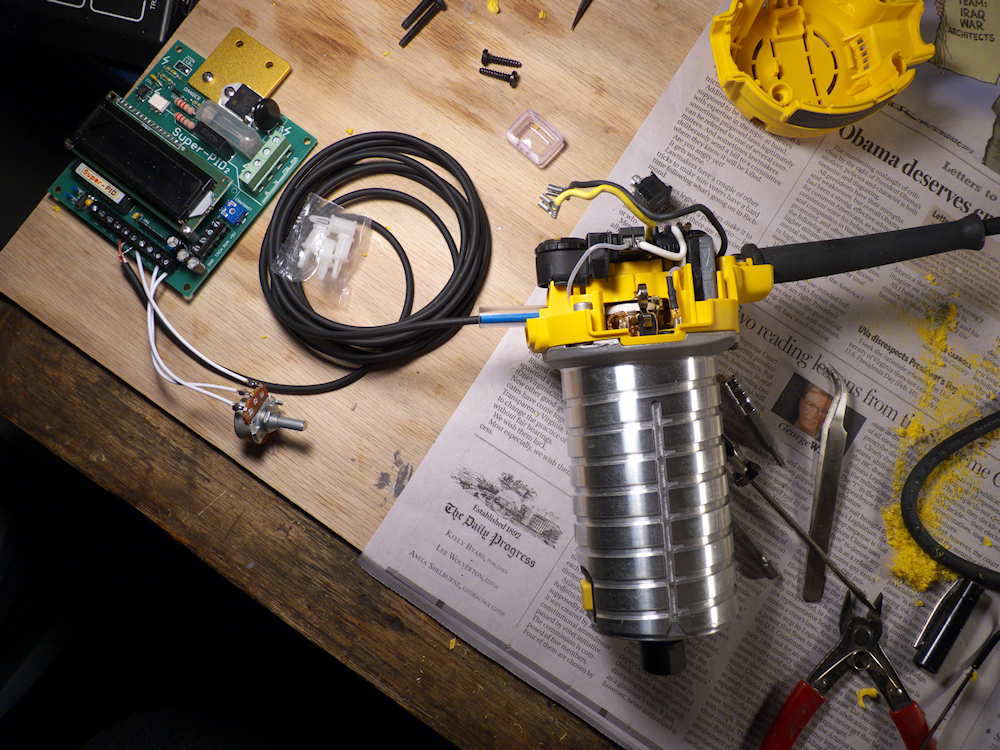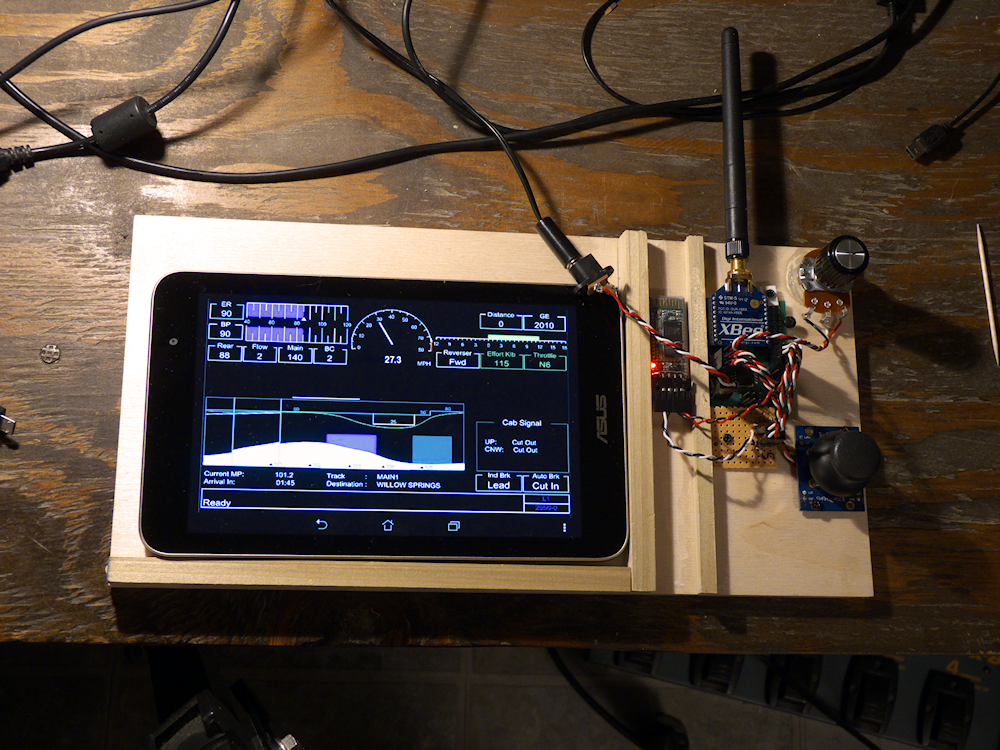
I’ve started some development for a new throttle controller, this one is based on an Android tablet for the user interface. My approach is a bit different than what is out there for tablets and smartphones though. I don’t like ‘sliders’ on a touch screen for controlling vehicles, so the idea here is to interface a small analog joystick (the parallax unit) and a potentiometer to do the actual control. The tablet will be used to pull up user interface screens for the locomotives and also have screens for controlling other things.
Basically, I’ve connected a generic bluetooth interface (about $10) to my Xbee Widget controller. The Widget can be configured to have up to 8 analog inputs, I’m using 3 of them here. I have the bluetooth interface on the spare serial port. On the other serial port is the Xbee which actually sends the commands to the locomotive.
I’m using PyGame to build Android apps with because I love Python!
Right now, the only thing on the screen that actually works is the speedometer. This is a screen shot of a Positive Train Control screen I dug up on the internet. I’m not sure what most of the other things on there are so this is just for playing around for now. But hey, it looks neat!
So anyhow, since I looked high and low and found ONE reference on how to scan the BT devices with Python, I decided to post up some python source to help out anyone looking to do this. As with most Python things, it’s really quite easy once you get the particulars ironed out.
To use this, just pass in the name of your bt device after you instantiate it. This is the same name you see when you pair your device with your tablet. In my case, it’s ‘HC-06’.
bluetooth = Bluetooth()
bluetooth.prepare("HC-06")
bluetooth.write("--testmessage--")
Here is the method. Note that the UUID in the device create is the same for all BT devices (as far as I know).
Jnius is a nice package that lets you call Java from Python so this could be used for other things besides Bluetooth I guess, but that’s another project. I really detest Java so anything I can do to write Android apps in python is great.
#
# Bluetooth interface class for PyGame- Python Android Games and Graphics development
# you will need the jnius python library to use this
#
import pygame
import sqlite3
import math
try:
import android
from jnius import autoclass
except:
android = None
class Bluetooth:
def __init__(self):
self.BluetoothAdapter = autoclass('android.bluetooth.BluetoothAdapter')
self.BluetoothDevice = autoclass('android.bluetooth.BluetoothDevice')
self.BluetoothSocket = autoclass('android.bluetooth.BluetoothSocket')
self.UUID = autoclass('java.util.UUID')
self.deviceValid = False
def prepare(self, name):
paired_devices = self.BluetoothAdapter.getDefaultAdapter().getBondedDevices().toArray()
for device in paired_devices:
if device.getName() == name:
self.socket = device.createRfcommSocketToServiceRecord(self.UUID.fromString("00001101-0000-1000-8000-00805F9B34FB"))
self.recv_stream = self.socket.getInputStream()
self.send_stream = self.socket.getOutputStream()
self.socket.connect()
self.deviceValid = True
def write(self, sendString):
if self.deviceValid:
self.send_stream.write([ord(b) if ord(b) <= 127 else ord(b)-256 for b in sendString])
def read(self):
datastring = ""
if self.deviceValid:
c = self.recv_stream.available()
if c > 0:
for i in range(c):
datastring = datastring + chr(self.recv_stream.read())
return datastring
def close(self):
if self.deviceValid:
self.socket.close()