
Trying to come up with a ‘critter’ CNC kit for a USA Trains motor block. This is going to take a couple of passes but I like it so far…
Trying to come up with a ‘critter’ CNC kit for a USA Trains motor block. This is going to take a couple of passes but I like it so far…


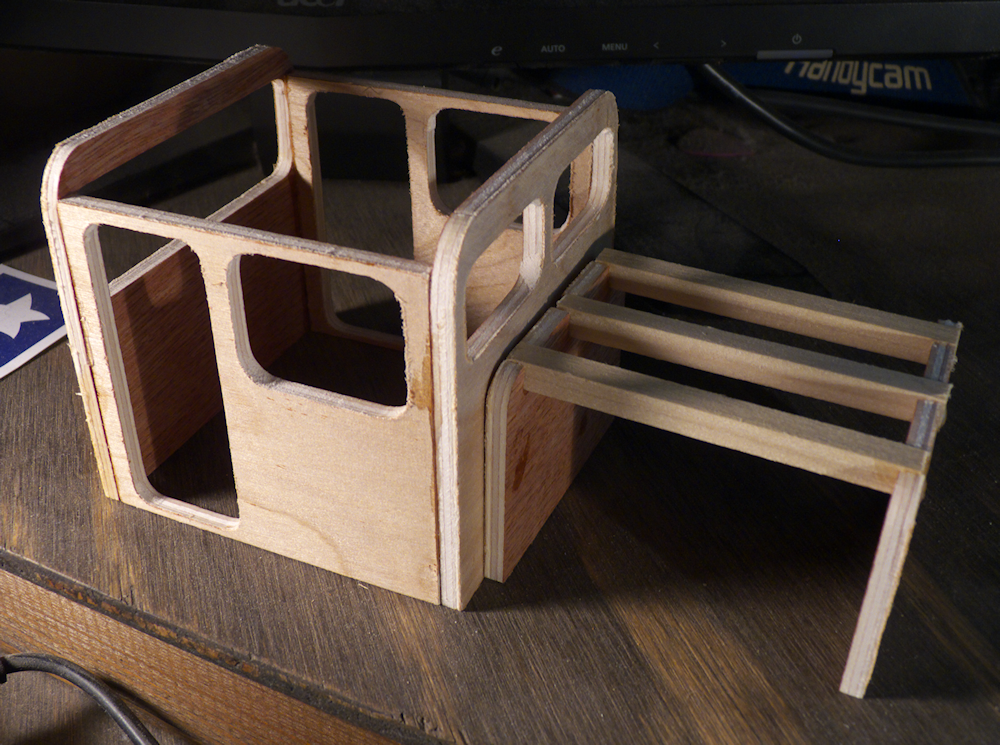
Couple of pictures of my finished CNC building. Painted with outdoor deck stain, glazing in all the windows, asphalt cement with sand for the roof.
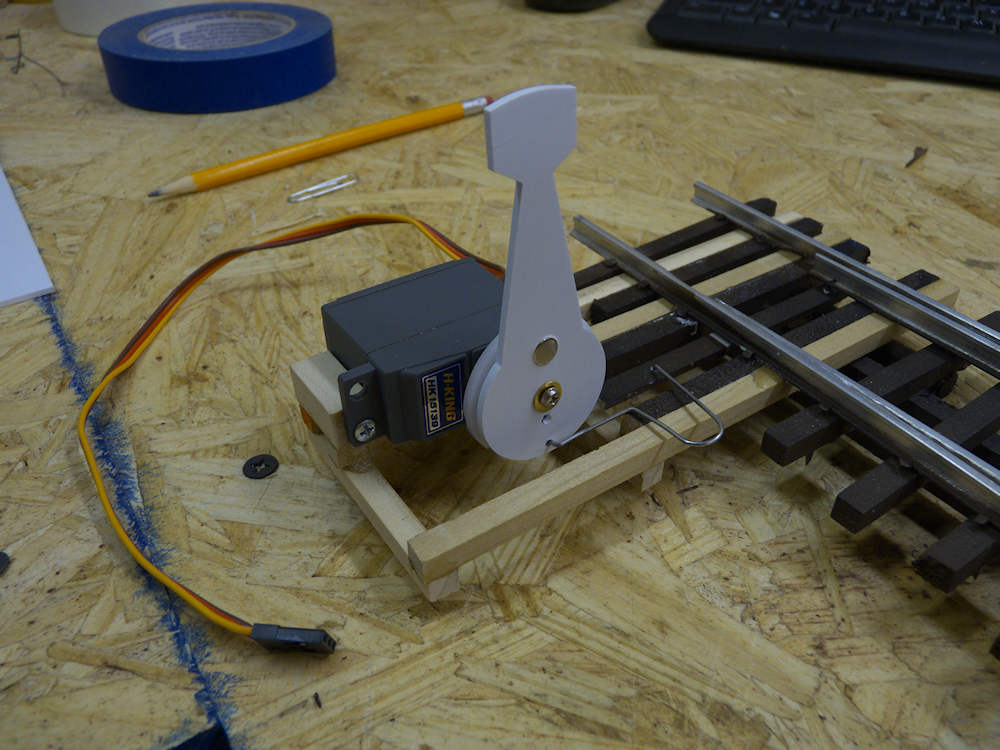
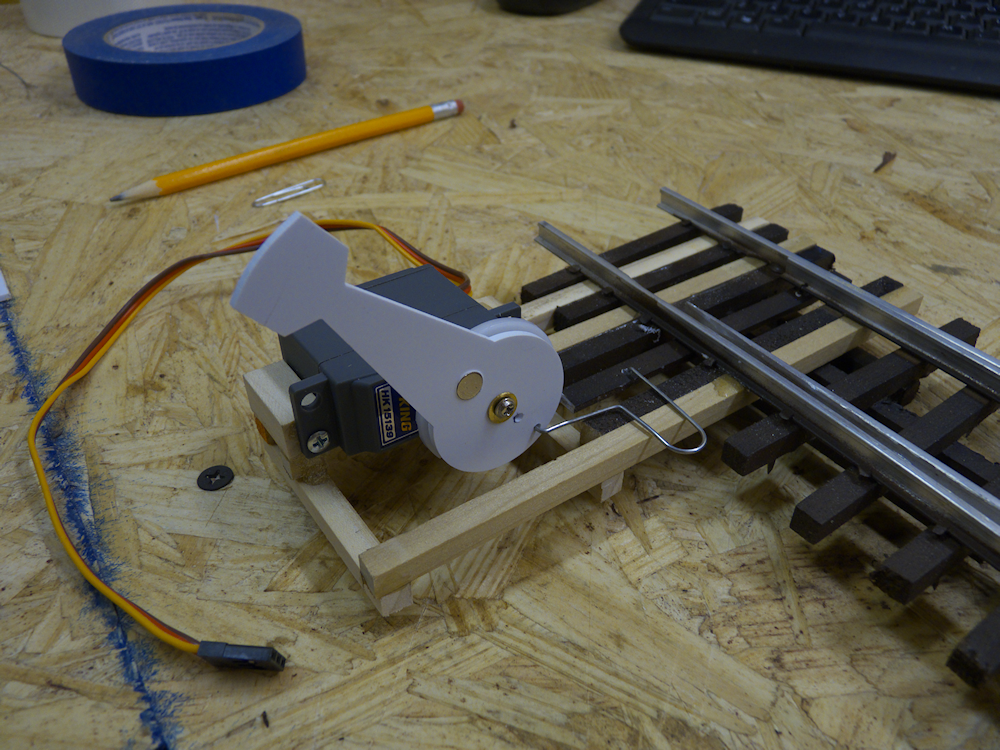
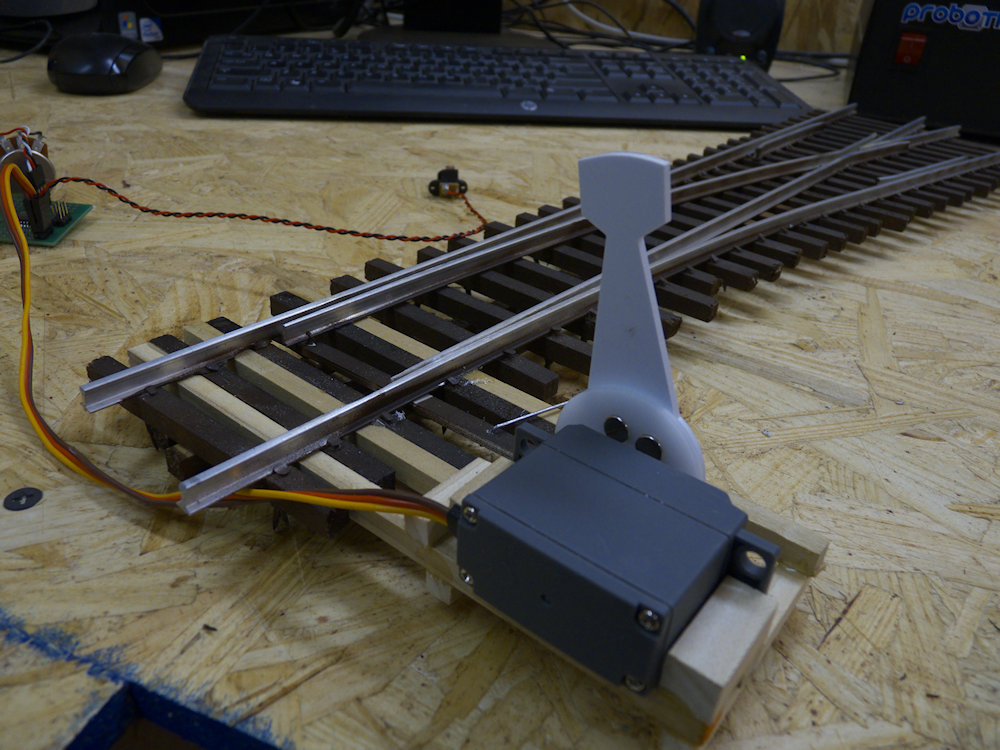
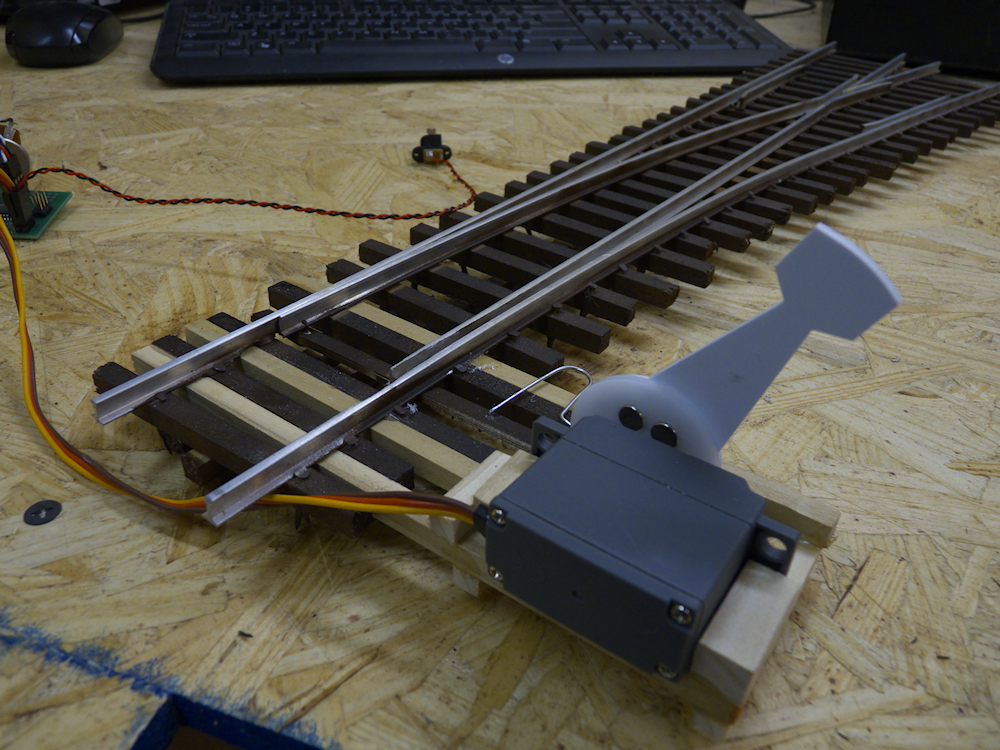
Here are some pictures of my computer/manual switch throw. I was looking for a device that I could use to throw a switch both with a manual lever and also have a servo drive it for computer control. This is what I came up with. After a bit of testing, it seems like it will do just what I want. It uses a cheap waterproof servo, three magnets and a styrene throw. There are two magnets on the servo wheel and one on the throw. There is no connection between the servo wheel and the actuator other than the magnetic ‘clutch’. The ‘spring’ wire is a paper clip bent to fit. With the servo off or centered, you can throw the switch manually and it ‘clicks’ to one of the two magnets on the wheel. Under computer control, the servo can rotate to ‘pick up’ the magnet on the arm to throw the switch. Works quite well on the bench so I’ll be installing it soon to test out in Gilbert.

Two of my favorite 3D folks printed from Shapeways in 1:20 scale. At this size you get some great detail in the cheapest print medium. They are still pricey but what can you do? I’m working on molds for resin casts but they are an art form themselves. Raspberry Pi in the background, pencil in the foreground for size.
They are here:
http://www.shapeways.com/shops/blueridgeengineering

Finally got the basics together with a coat of primer. Some 1/29 People standing in front. Need some glass in the windows and an interior, some shingles on the roof and other details but the basic shell is coming off the router pretty well now. Still needs some tweaking to get a good solid production run but it’s coming together nicely.

Man, my o-flute-upcut carbide bit does some clean work on .125 inch styrene! This is the design from a few posts down, cut out with the CNC. A waterproof R/C servo provides the automation. The arm has one super magnet, the wheel on the servo has two. The idea here is that you can throw the lever manually to control a turnout but that it also remains at all times under control of the computer.
That’s the plan anyhow. The magnets are those little really powerful ones. They act like a ‘clutch’ in this situation. So far it works on the bench but the real world is another story, I’m not quite there yet. I need to install them on my three turnouts and stick them out in the cold rain for some testing.
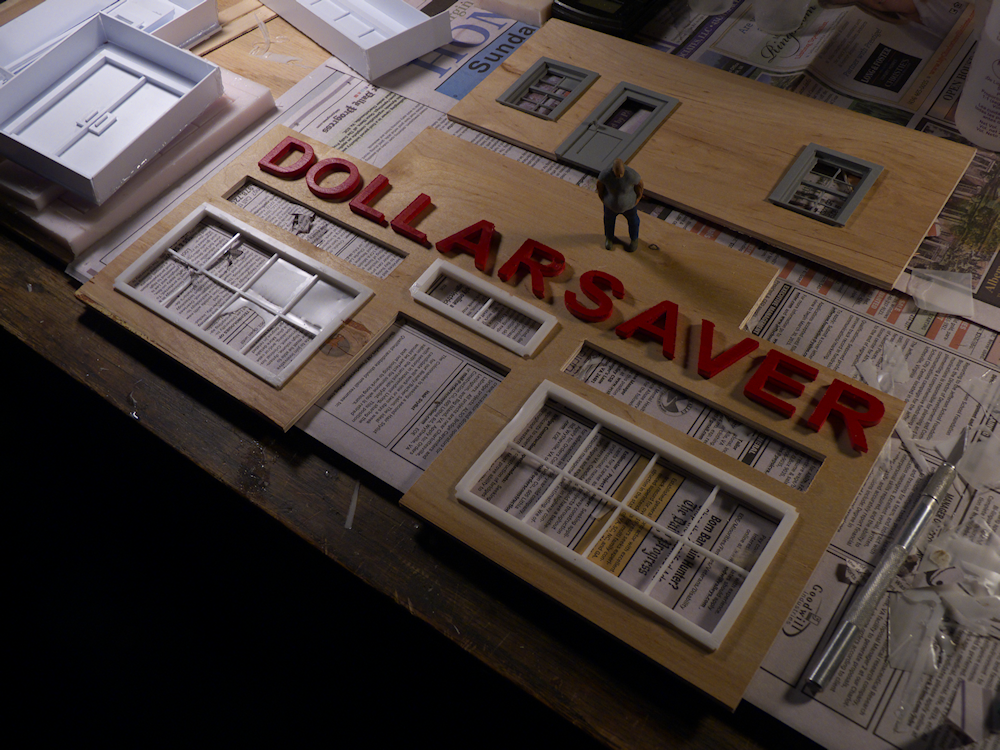
It’s a learning curve but I’m getting there. Here is the basic storefront and one side of the dollar saver general store. Mr Big checks out the sign. I still have resin casts and a couple of molds to complete, the ones shown are obviously not up to par. I’ve been through about 12 sheets of 18×18 inch 1/8 ply to get here but I must say, this is the BEST machine I have ever bought. I just got a set of 1/32 inch carbide bits, they work GREAT and give a super smooth finish, the letters were all cut with that bit.
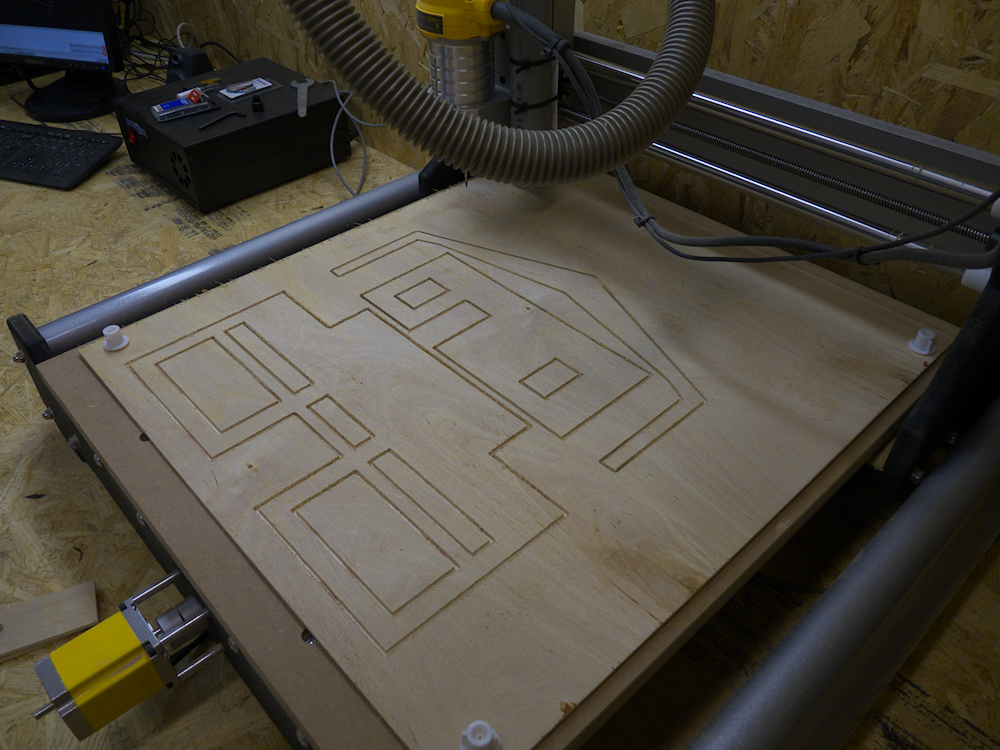

So here ya have it, front, side and support of a building I’m working on. All the window and door openings look rough but will be filled with resin castings. There seems to be a sort of ‘black art’ to selecting the right bit for the right material and then getting the feedrate right as well. I’m closer to figuring it out I guess.
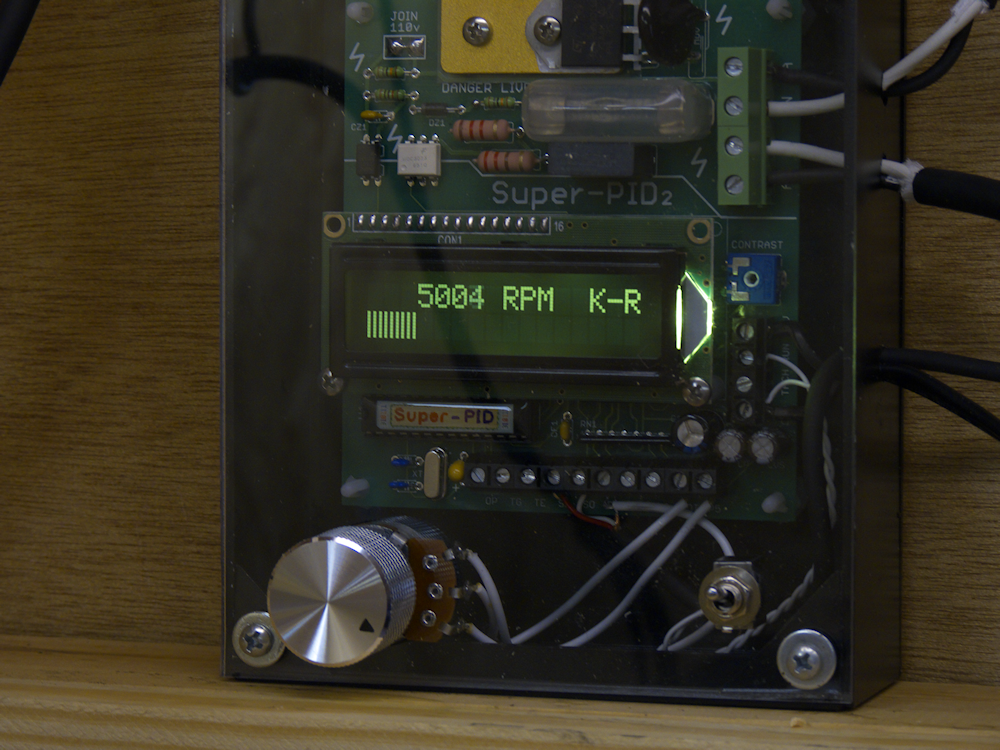
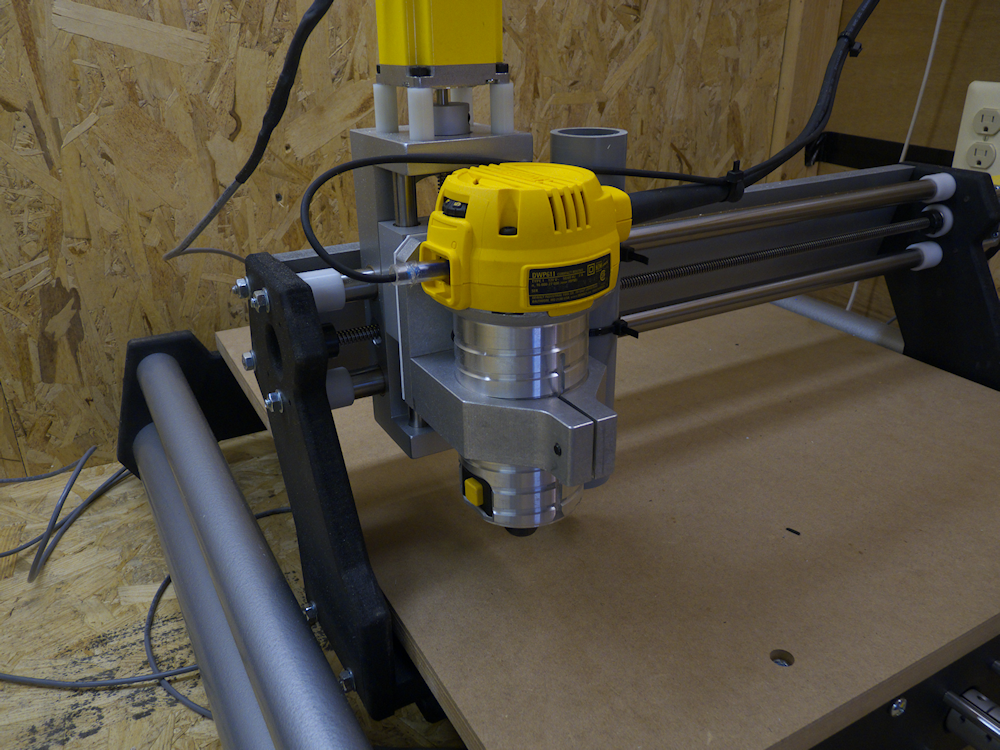
Super PID speed controller online and tested. Works GREAT! I built a custom enclosure out of styrene and did some surgery on the router to get the sensor positioned and the innards rewired. Way worth the effort.
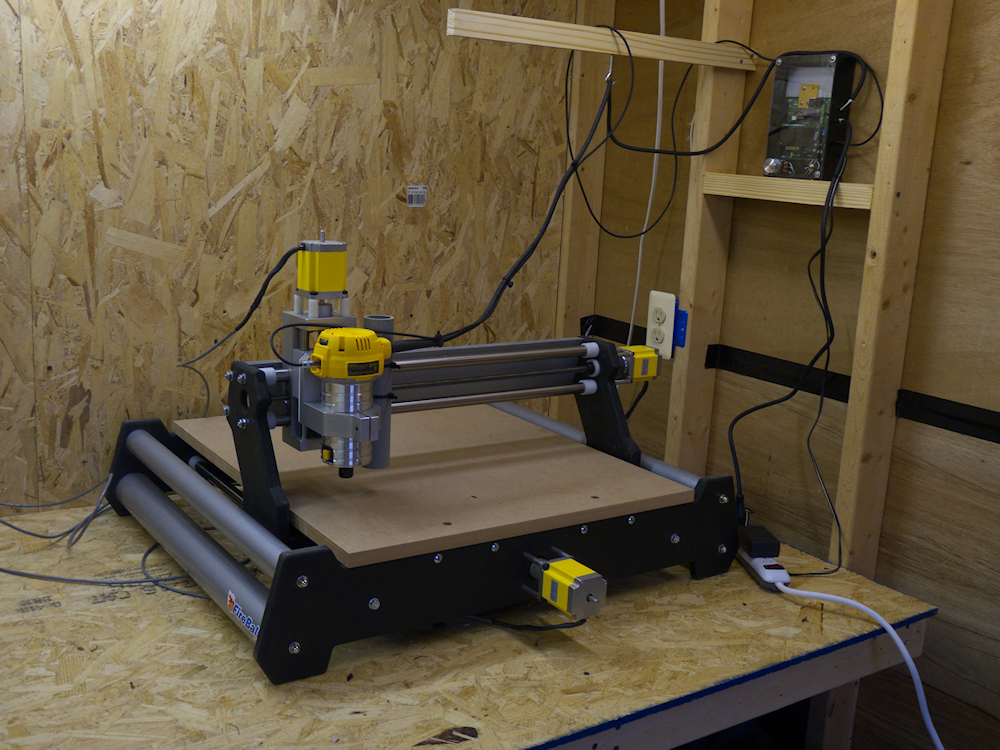
I am almost ready to do some cutting, just need to get the vacuum system online and finalize my tool paths. Awesome.
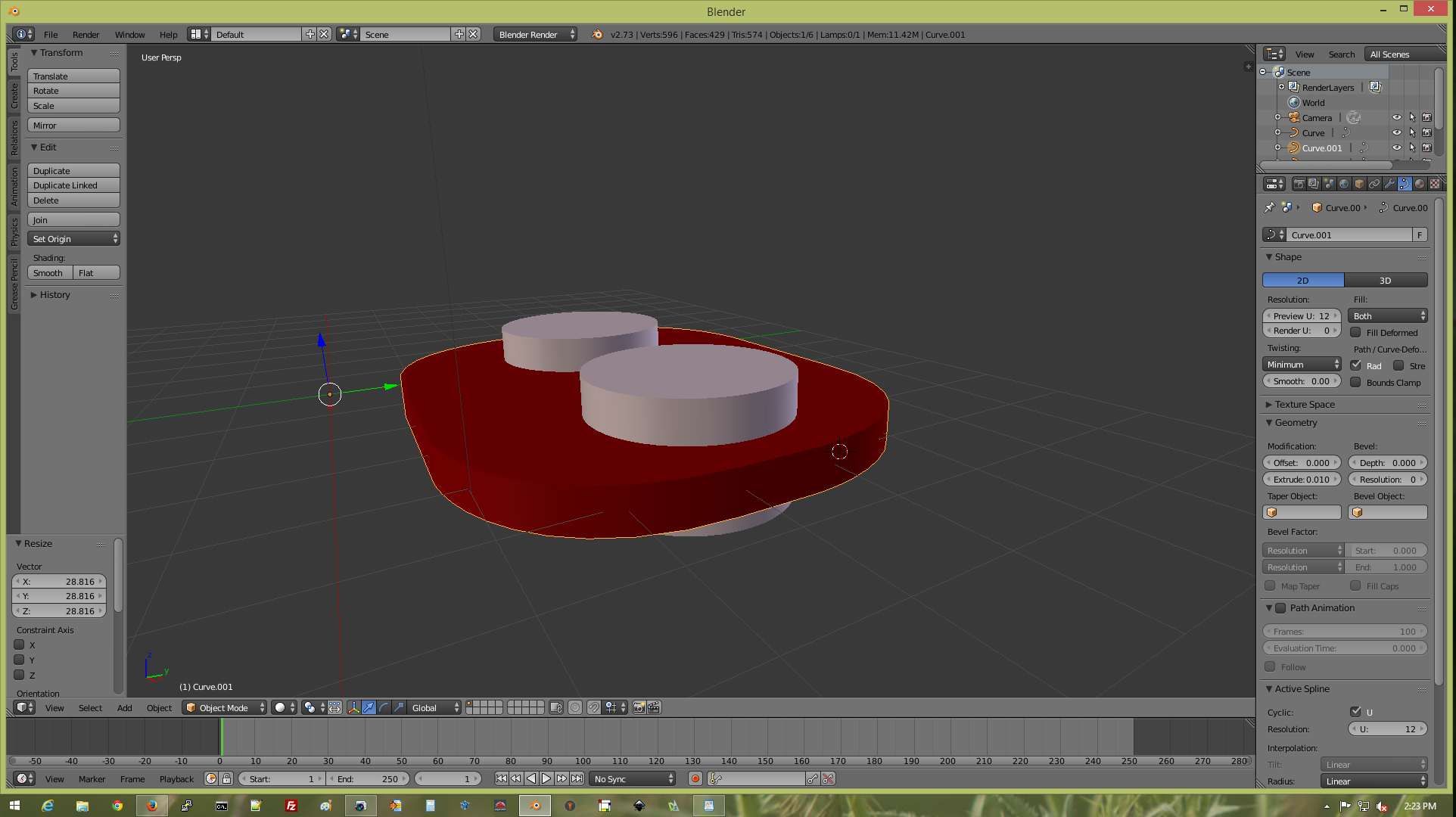
I’ve created a sort of tutorial on getting a simple vector drawn part in Inkscape into Blender and turning it into a 3D part.
You can find it here: