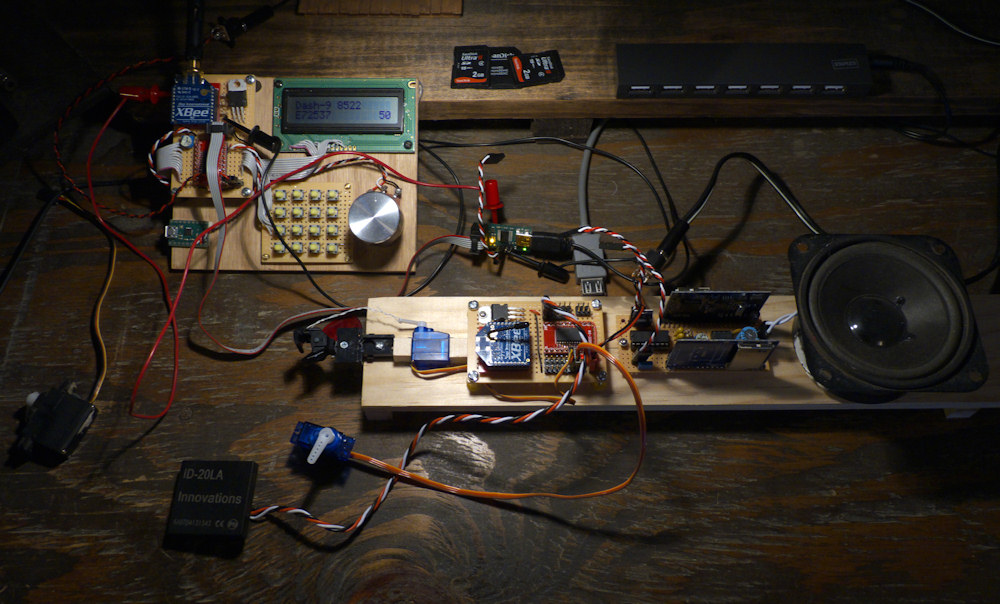
I refactored the software for both the master and client nodes over the last few days. I cleaned up some of the prototype code, added some basic structures to lay over the xbee transmit packets and moved things around just a bit. As far as functionality, I can now control three servos and send the RFID tag reading back to the master. If you look closely at the display you can see the raw hex code from a read in the lower left of the display. The ID20 from Sparkfun is a really nice reader, it catches the card passing by very quickly at about 40-50mm.
This also shows some experiments with the Kadee coupler controlled by a servo. Seems to work well, but this is on a bench test setup, not a real locomotive- but I’m optimistic. All I did was drill a very small hole in the ‘tab’ on the coupler. This is a standard Kadee 787 coupler meant for the Aristocraft RS-3. The actuator wire will be replaced by a chain or something more cosmetically pleasing.
The sound cards are the next step. Right now I’m feeding the power from the same bus as the servos so I get a bit of noise mixed into the amp output. I’ll clean that up later, for now all I hear is the servo when it moves, other than that it sounds fine, good enough to get the s/w working.