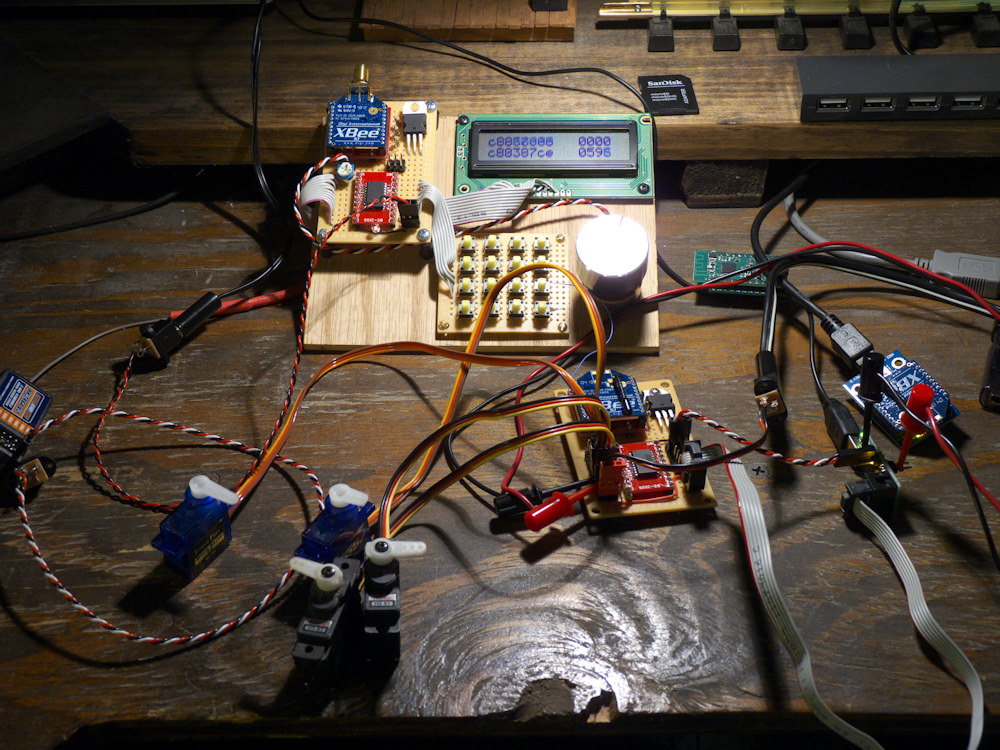
After two designs, I finally have the servos working. I can drive pretty much any number of them, I’ve got four going here. Currently the plan for the ‘client’ node is four servos, four mosfet switches, a serial port for intercepting RFID and a transmit only serial port (in s/w) to drive two channels of mp3 sound. There will also be two input pins left over for a current sensor and a speed/distance counter.
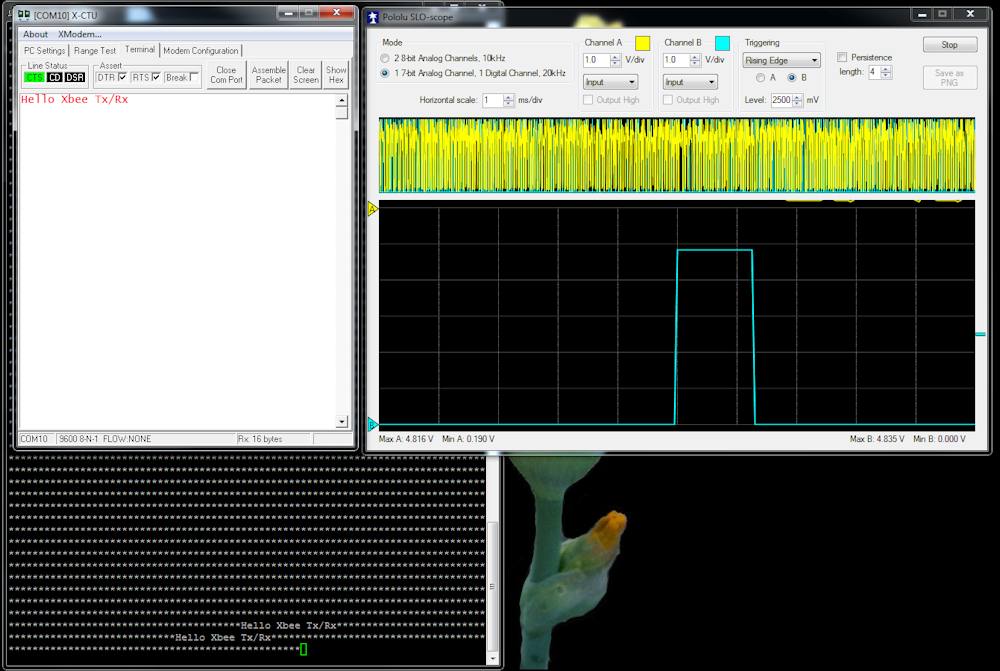
I have the transmitter/hand held prototype sending values read from the knob to the client and out to the servos now. Nothing fancy, read, transmit, repeat every 10ms and all the servos are sent the same value, but it does work well.
Still a bit of R&D, I’m not sure on the speed of the transmit to the Xbee module, currently it’s 9600 baud, I may have to increase that, but that’s not a real problem. I think other than that, most of my h/w design is working and has the appropriate low level support.