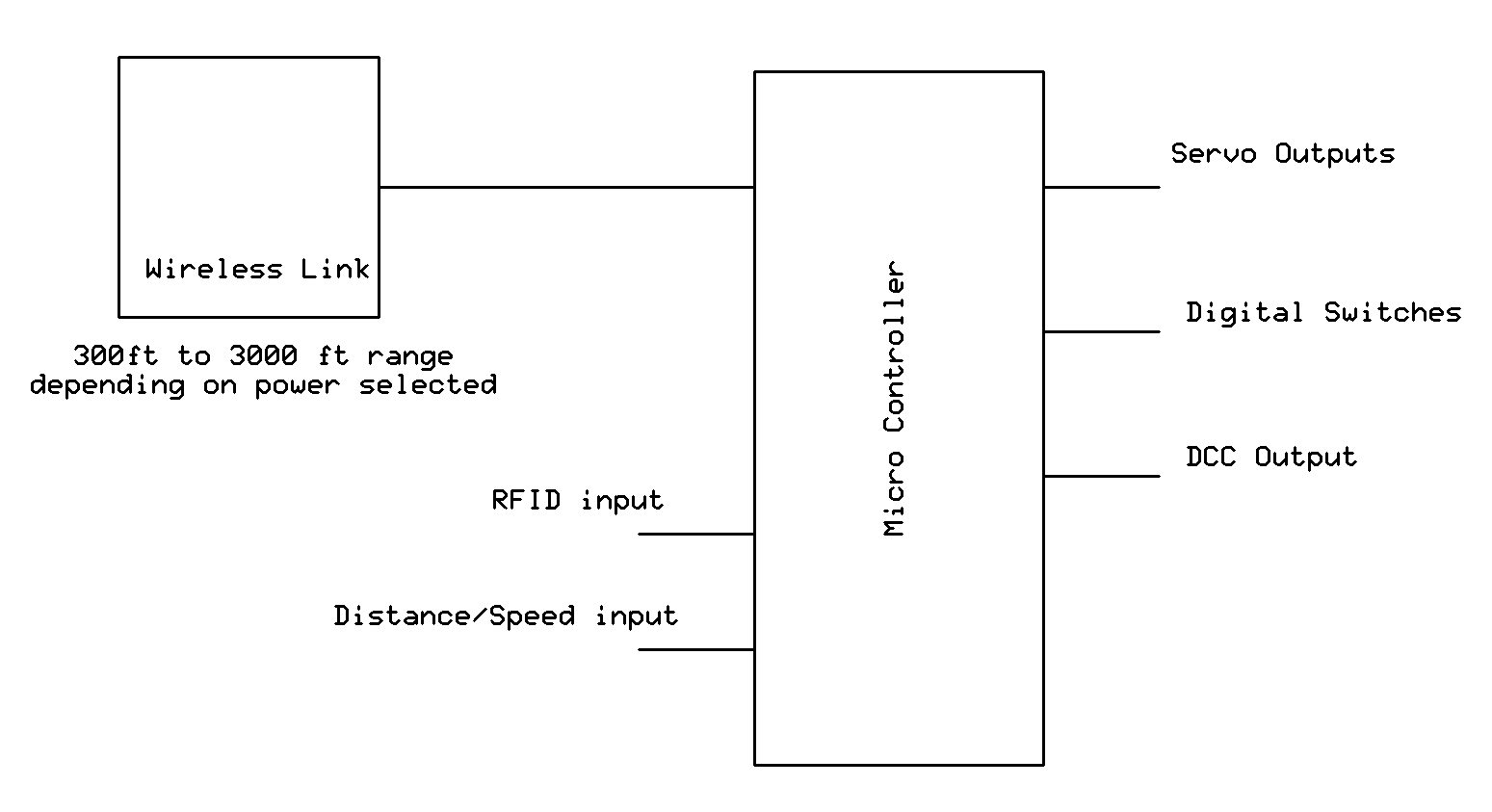
So this is the basic diagram for the locomotive (client node) side. I personally don’t need the DCC but I think that would be a good thing to have for compatibility if I can make it work. The motor controller is going to be external, I am assuming a Pololu 18v7 on servo channel 1. The wireless is the Xbee, you select the distance, the cheap one is 300 ft or so and the expensive one is up to a mile outside. The idea is to use an open source communications protocol in a very small, wireless mesh network environment and then provide a very low cost but expandable series of h/w boards to implement that. The end node can drive servos, digital outputs, dcc and provide real-time feedback like current draw, speed and position. That’s the plan anyhow.