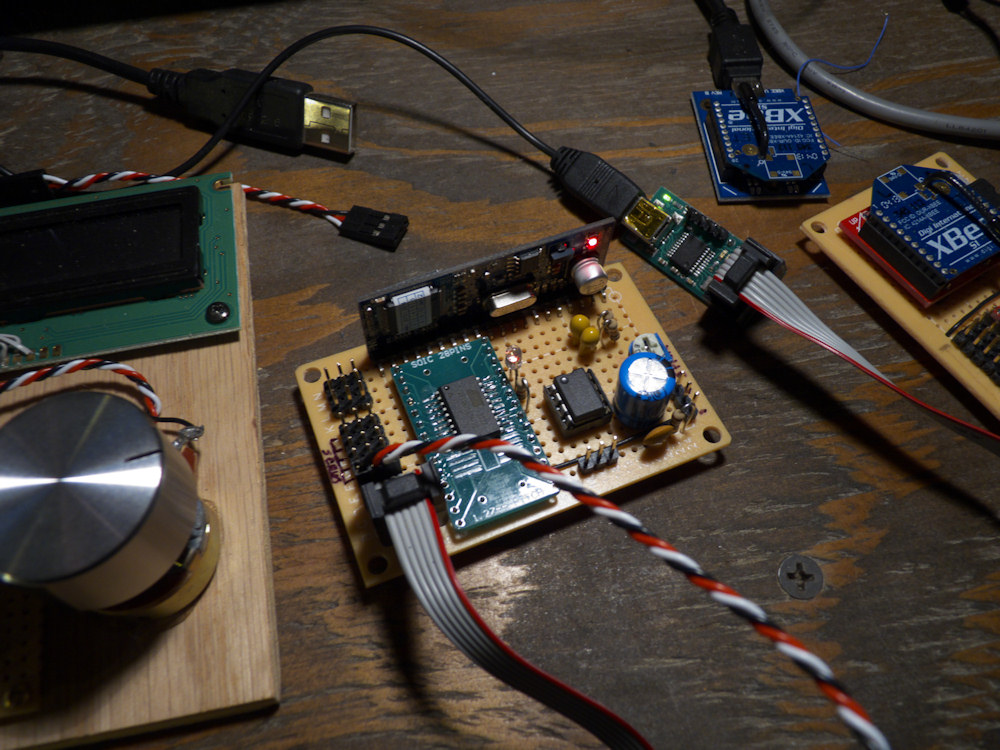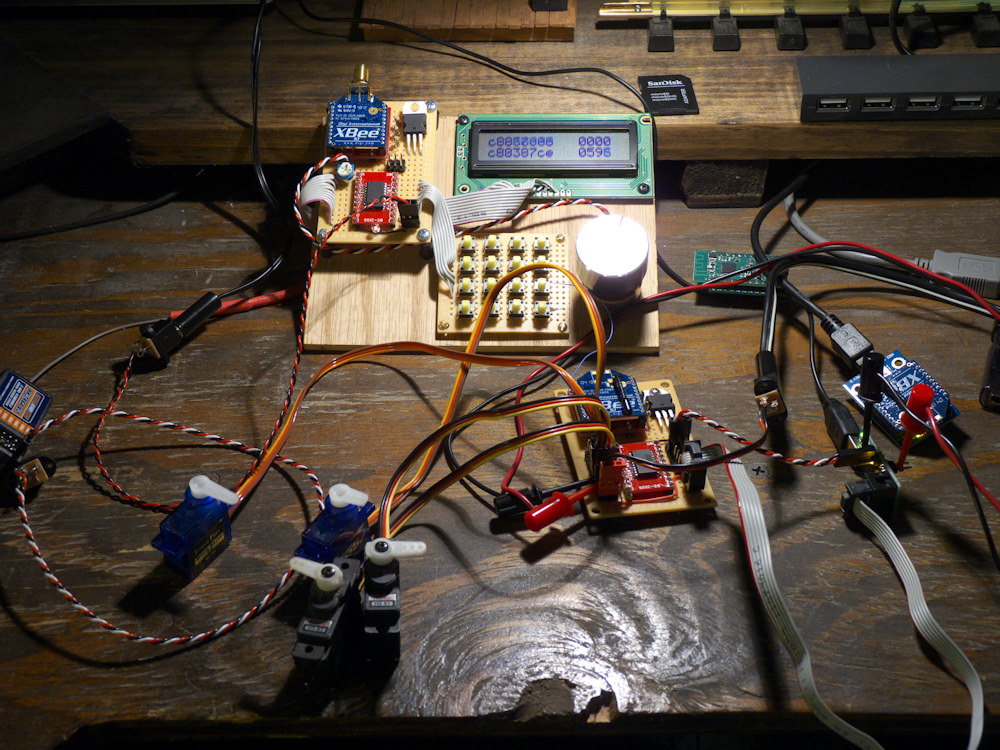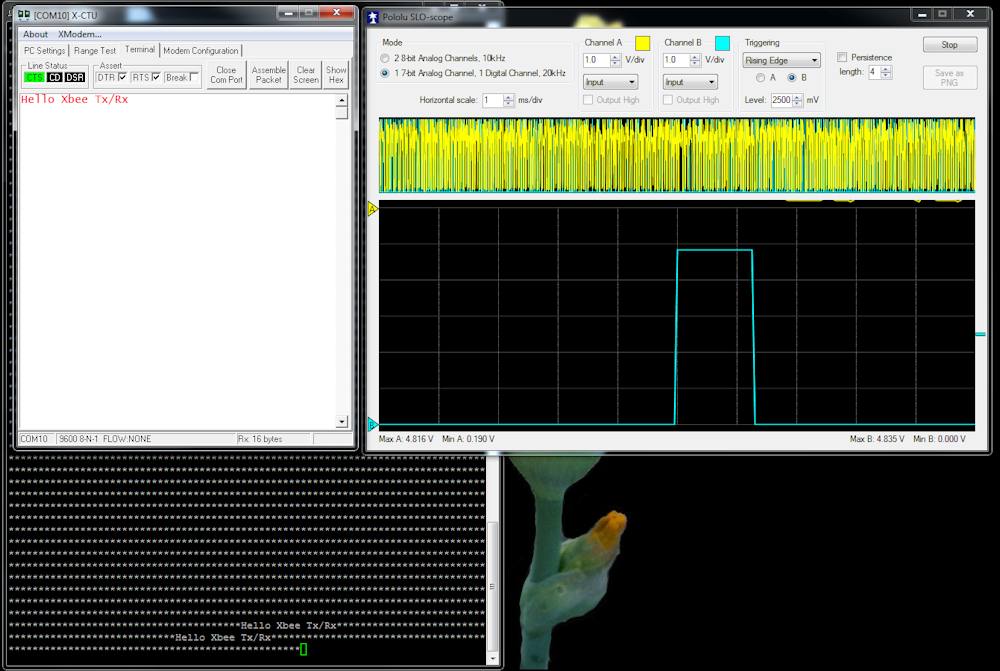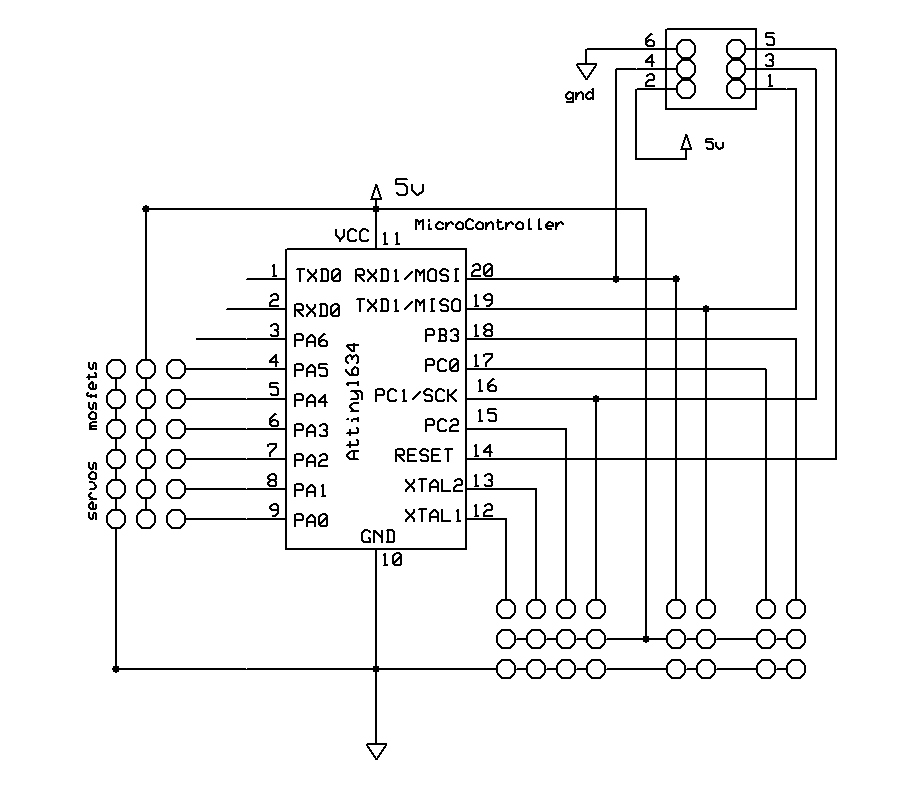
This is the base circuit I’m using for all my designs these days. Ridiculously simple. The TX ports at the top of the chip can be used to export debug information to a TTL serial port or control/read other peripherials (wireless, sound etc).
The debug port plugs directly into the Pololu USB AVR programmer. Combine this with Atmel Studio 7 and this is a powerful development package.
You have the choice of C or C++ as far as a programming language goes. Personally, I favor vanilla C, it’s easier and I think, faster.
Anyhow, the Attiny 1634 is a SOIC surface mount chip, you can use a ‘schmart board’ available at your local Radio Shack, or you can order a 20pin version from Sparkfun Electronics to make breadboarding easier. I’ve uploaded the data sheet for this microcontroller to my site, you can find it HERE
Ok, as you can see, I’m into minimalistic designs. This is a super simple circuit, you can have this up and running including the Pololu USB programmer and full development software for, uh, $30 or so. Yes, you will have to do some soldering but it’s well worth it.
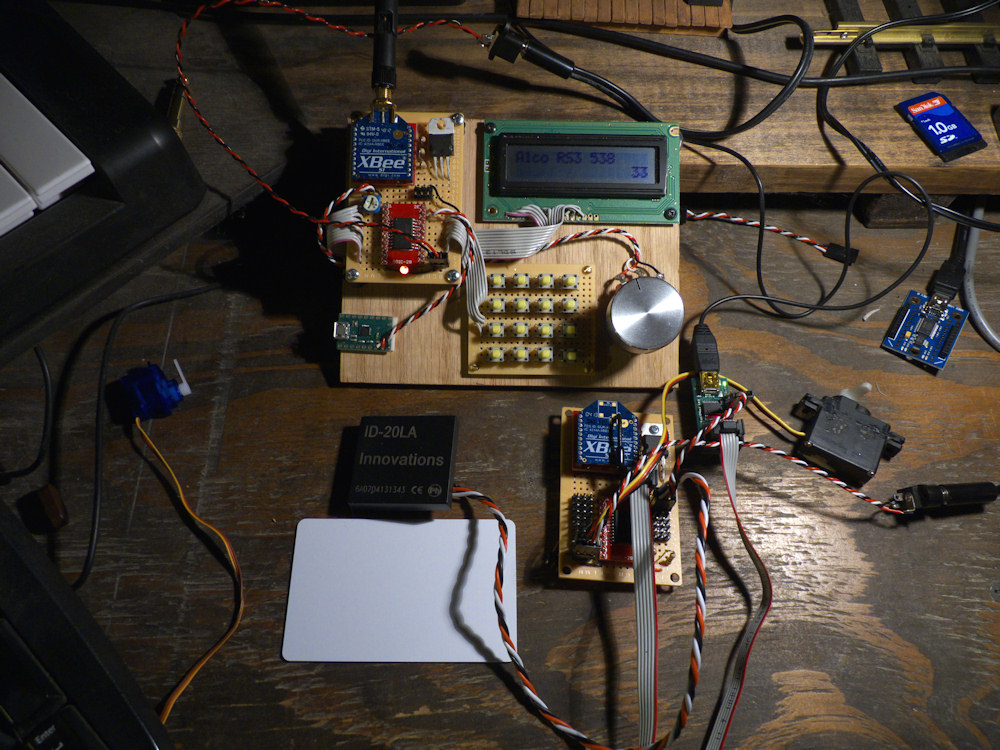
Programmed correctly this chip will drive servos, motor controllers, ESCs, lights and other loads. And (again) with the right software, it can also read servo pulses from a standard R/C rx and let you do things with that. Move the stick or knob on your RC transmitter to set lights, trigger sounds, etc.
I also have hooked it up to an XBee 802.15.4 real time radio module. (Super tiny and it’s $20) to do wireless up to 300 ft. So you can do that too. You can also connect an RFID reader, or perhaps a current sensor and a speed indicator. There is a tremendous potential with this chip. 16K of programming space, 1K of RAM, 256 bytes of EEPROM and two full speed serial ports. Freaks me out personally, your mileage may vary 🙂