

Working on my RV Park in Burnley. Still needs a bit of work, another trailer and perhaps an office.
Working on my RV Park in Burnley. Still needs a bit of work, another trailer and perhaps an office.


We brought the new puppy home this weekend. She is an 8 week old German Shepherd and spends most of her time in two states, sleeping or bouncing off the walls. Rinse, repeat at hour intervals. Sophia is her name.
More Progress on the Android Bluetooth Throttle App. I’ve been working on this for several months as time permits. I’m very close to an initial release of it. Below are screen shots of each of the pages. This is what I call the base level app- I also have several special screens I’ll add later that will allow the configuration of the SoundTraxx and TCS Decoders using plain text selections instead of having to punch in CV numbers. I also have some battery only sorts of screens that I’ll add later on.
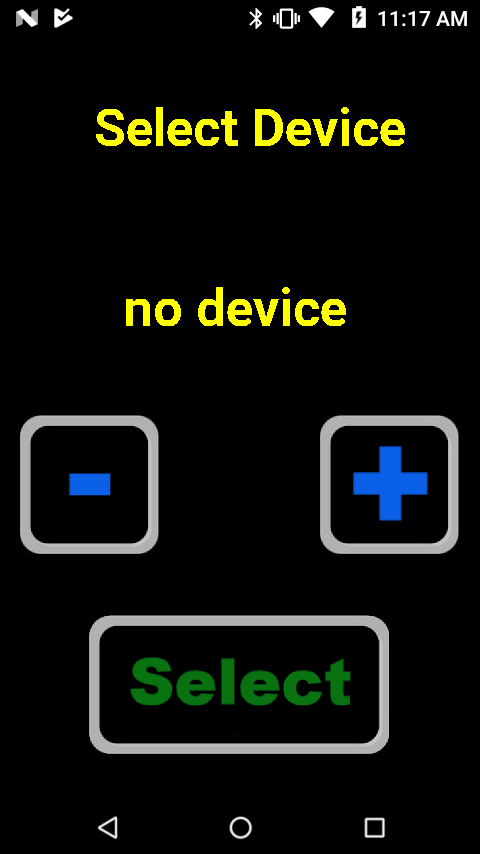
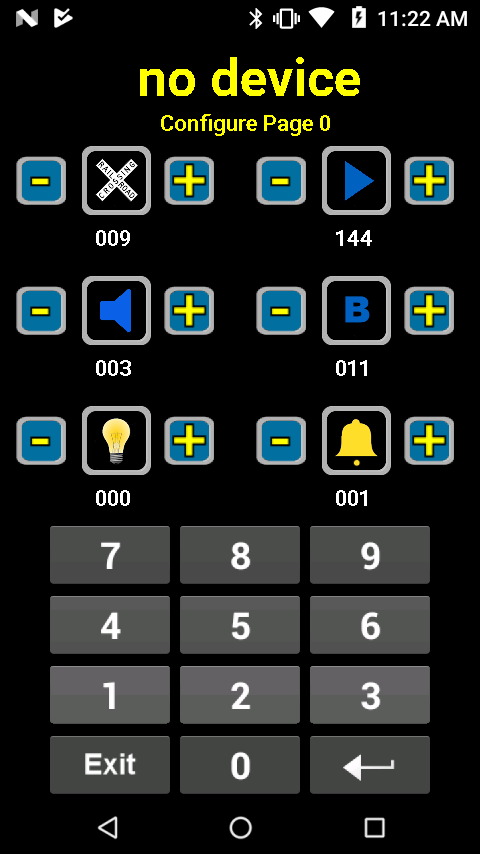
This is the first screen. Use the plus/minus buttons to view which paired device (locomotive) you want to control, the press select. Once selected, the app will remember the last setup you made with it and set all of the buttons, function codes and screen configurations.


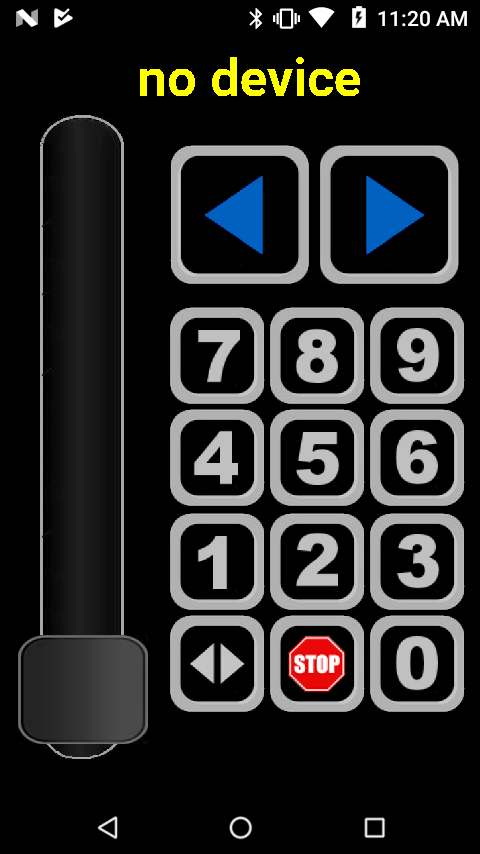
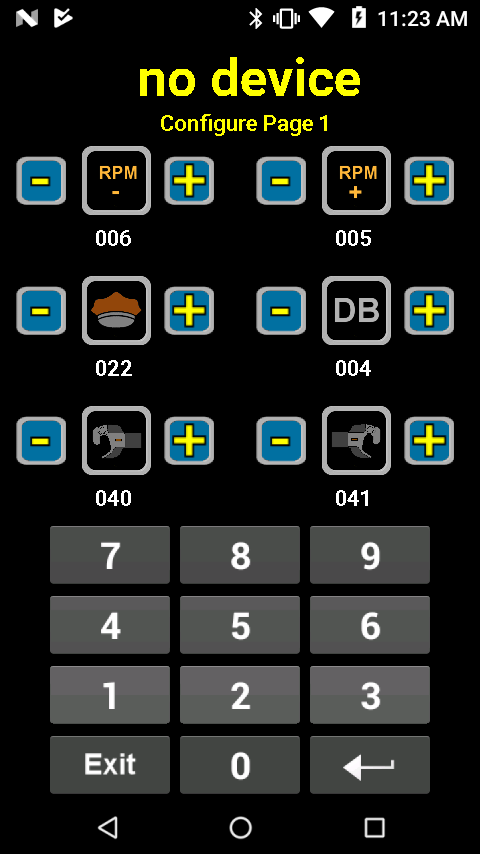
These are what I call the ‘main’ screens. They have the most used functions, horn, bell, direction, grade crossing, etc. Each of these icons is programmable, you can set the picture as well as the DCC function code it sends out. (see below)

The above two are ‘generic’ DCC command screens. These are not programmable but you can show or hide them. These send the corresponding DCC function code.
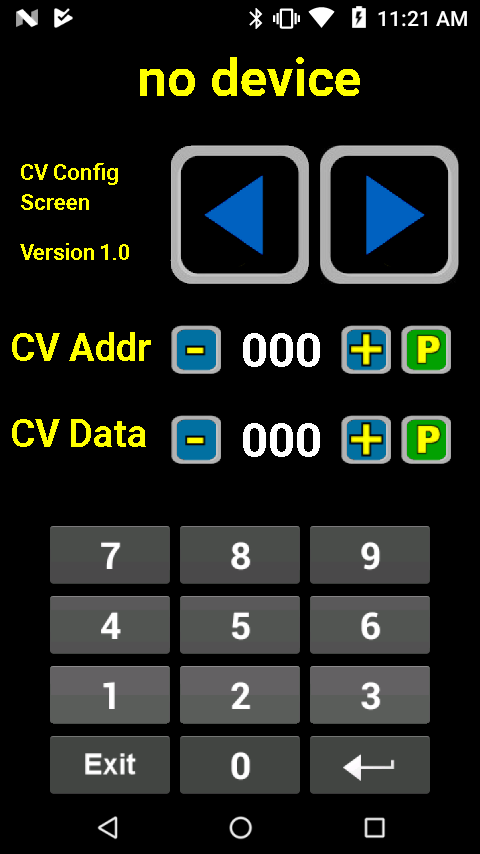
This is the CV programing screen. Use this to set CV address and data for a particular function.
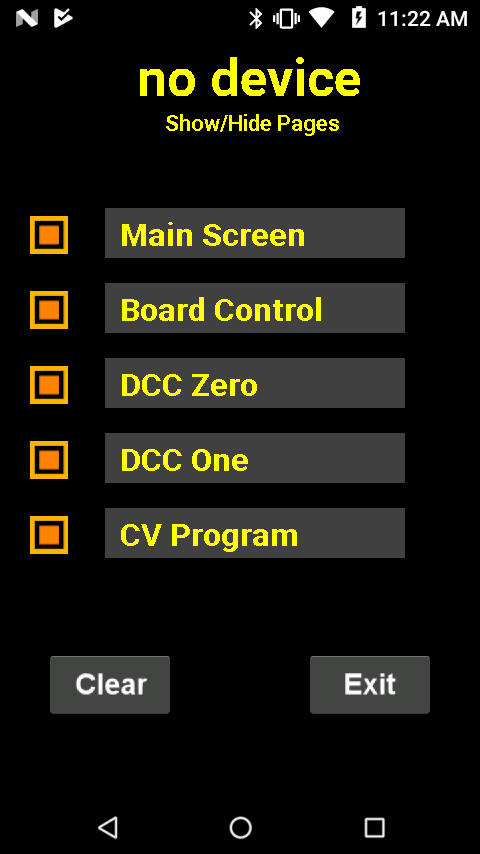
This is the page configuration screen. You can set each of the above pages to display or not here. The ‘Cancel’ button will clear the current configuration and set everything back to defaults. Cancel requires that you press it 5 times in order to clear to prevent hitting the key by mistake.
Tapping the ‘Main Screen’ entry will take you to a screen that allows you to set the icon and function code for each of the buttons. You can also tap the ‘Board Control’ entry to configure that screen as well. See below.
The above are the two screen configurations. Use the plus minus to change the icon picture. Press the icon and the number turns green so you can enter the associated function code for that button.





Don’t have her quite yet. She is only 4 weeks old in this picture so another 4 to go, but this is the one. She will join our other two shepherds, Zack and Molly.

Blu Phone Sends Bluetooth to control Aristo U25B with Soundtraxx TSU-4400. 2200 mAh Lipo battery, Full range TangBang speaker with passive radiator. Rewired the lights for LEDs. Good speed and power on the U25 at 14.8v.

Since my Python Apps do not work on any Android Version greater than 6, I am working on re-writing them in Android Studio. At first I was not particularly thrilled that I had to re-write everything but now I’m starting to really like Android Studio. I’ve decided to add additional functionality so that I only need one App. The name of the bluetooth device (the locomotive name) will now allow the app to ‘configure itself’ when the locomotive is chosen on the phone. If the locomotive uses a TSU-4400 SoundTraxx decoder, the appropriate screens will come up for that. I am also going to allow the main screen to be programmed, change the icons and what function codes are associated with them.
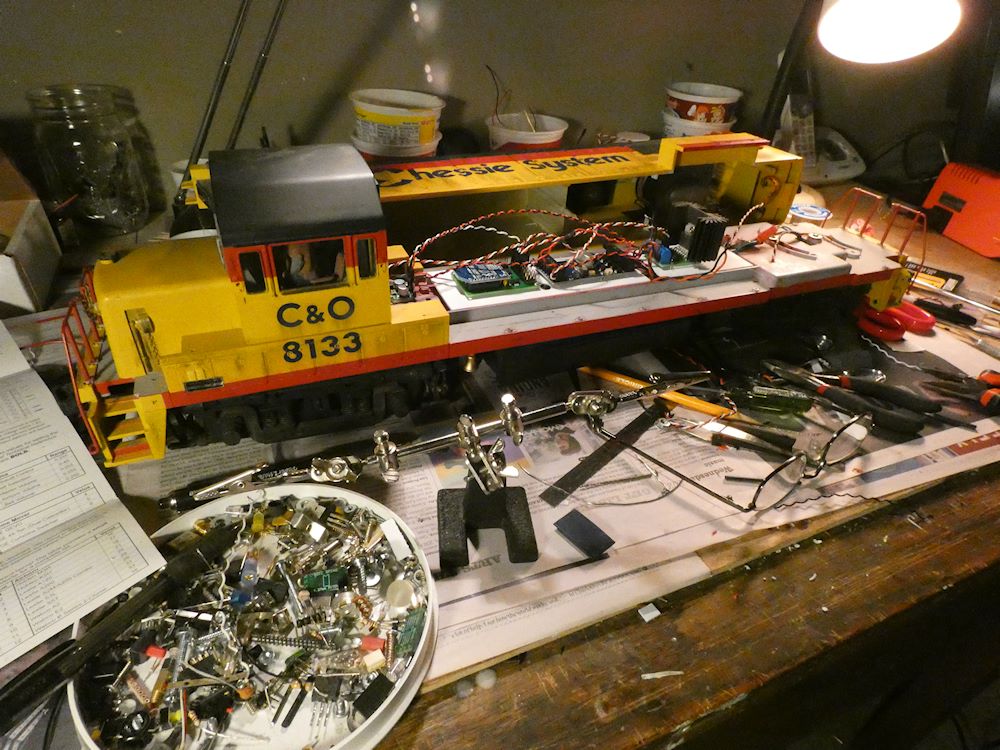

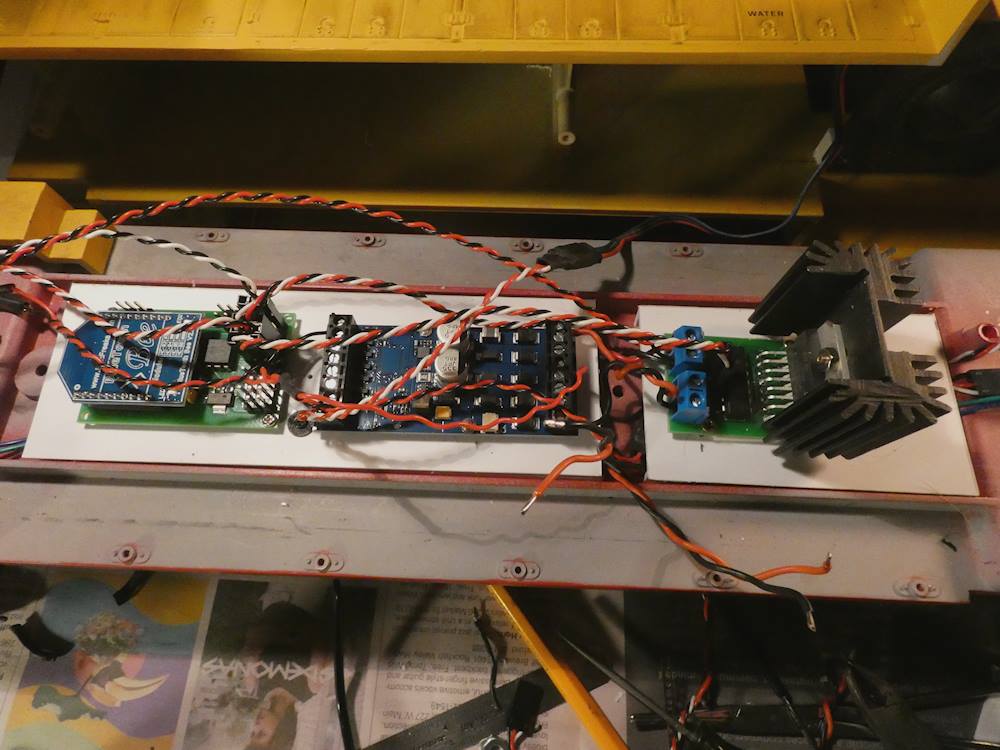
Adding the Bluetooth Controller to my Chessie U25B. Bluetooth board, Soundtraxx TSU-4400 and DCC Amplifier. 2.2 inch tangbang speaker with passive radiator. Servos on the couplers. There is a 2200mAh lipo in the fuel tank.
I’m getting great backwards motor drive but forward is not good. Not sure why that is. Taken apart on the bench I get a solid torque but out in the real world, not so much. More investigation required.
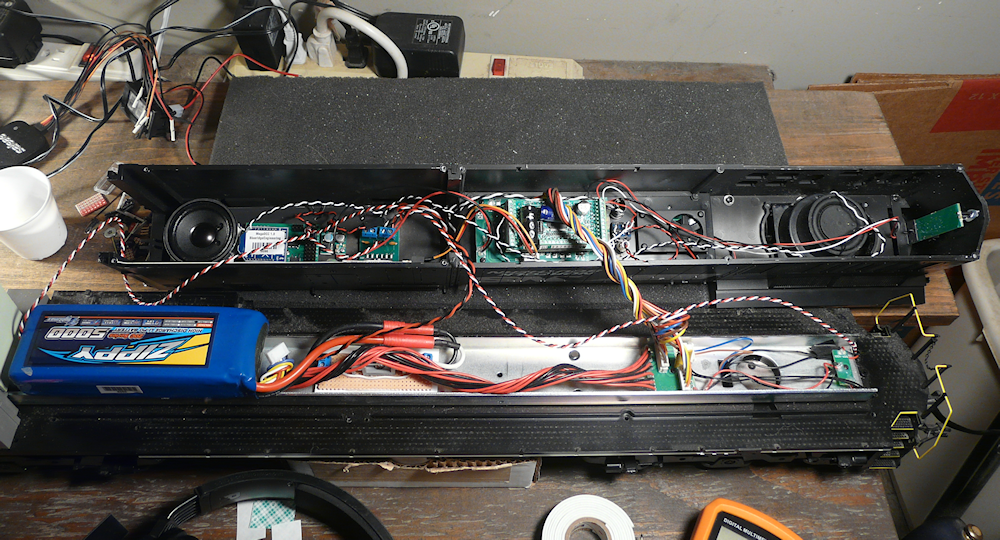
I already had this locomotive hooked up for the most part, I was driving it with my Xbee Board so I swapped that out with the Bluetooth version. I also replaced a tiny speaker I had in the front with the one in the picture (on the left). Much Much cleaner sound mix. Bells and horns out of the front and the prime mover going to the back speaker with the passive radiator.

Here it is out on the layout, ready for a test run.
Here is a video of some basic testing. It still needs some tweaking on momentum and motor voltages. Please forgive the poor video and sound quality- my nice camera died and this is my backup.
I also ran my latest version of the Generic DCC Phone app. Works quite well now. The QSI is a tad on the finicky side however so I made a very small mod to the firmware in the Bluetooth Widget. Once I back test that on the other decoders I’ll roll it into the firmware release.
You can find all of my Android Train Control Apps on Google Play.