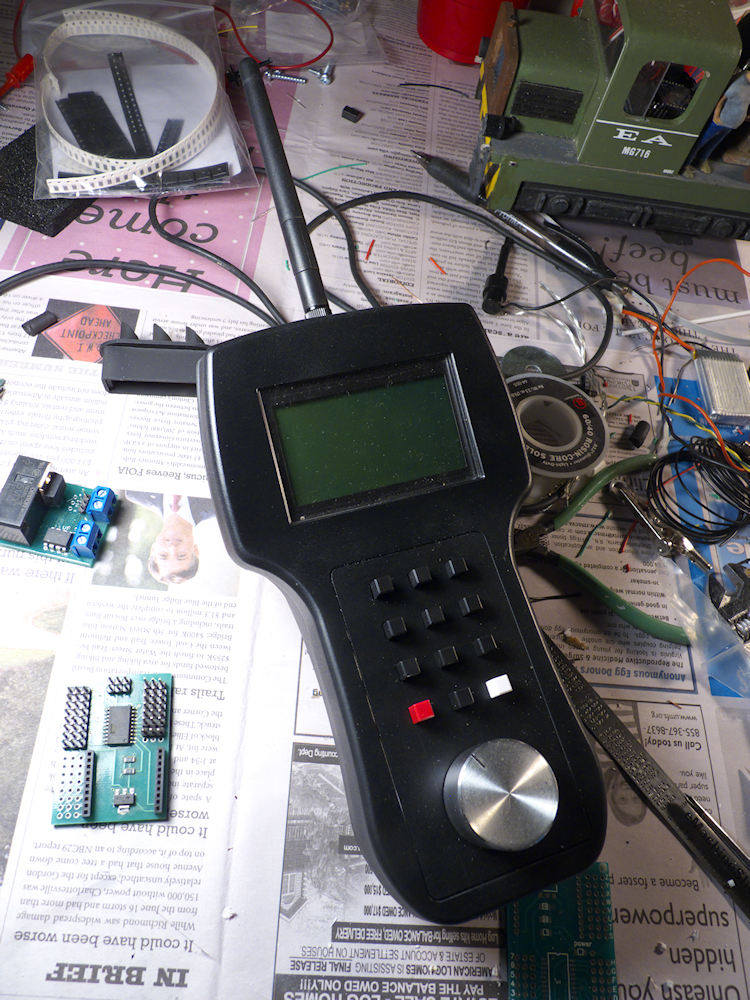
This is the base design for my new hand-held controller. Along with a new case and display, I’m going to refactor the software to provide a cleaner interface into the clients (locomotives). Right now my ‘phase A’ handheld knows a little too much about the clients, I want a more disconnected sort of protocol. Anyhow, I’ve gotten everything to fit but the graphic interface required some new hardware so that has not been tested (other than a basic smoke test). I’ll need to write the code for that and then port parts of the old handheld code into it. The keyboard, knob and Xbee interface should not have to change much, I just need a calibration step on the kbd and store that into eeprom. I’m going to have a usb interface into this so I can write a tool on the PC to setup the function keys and display.