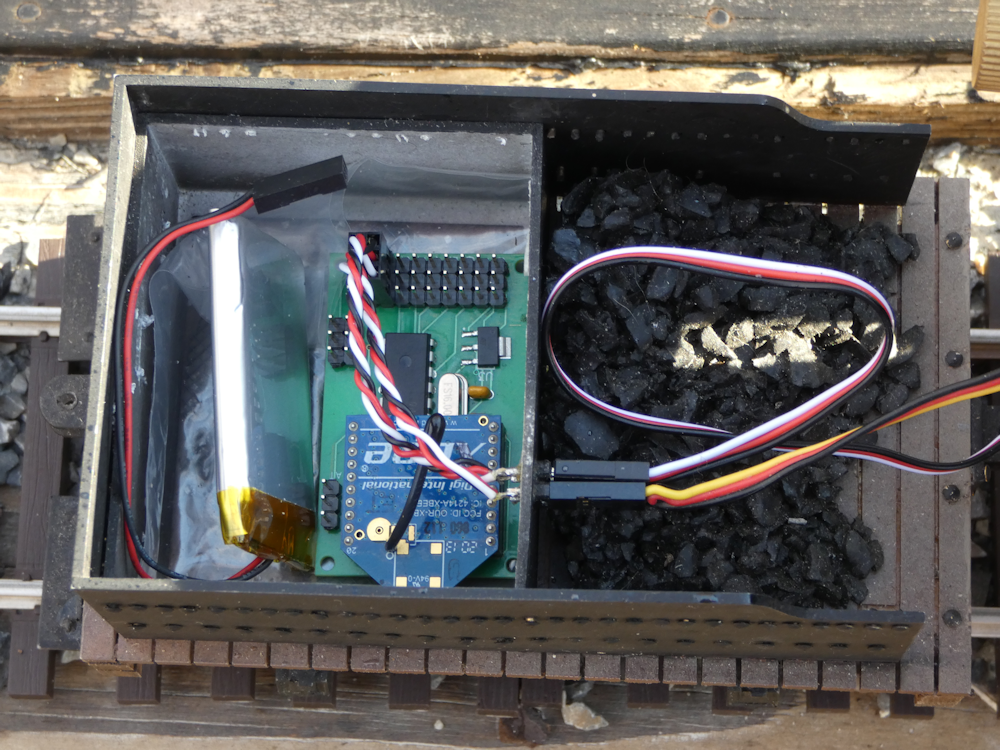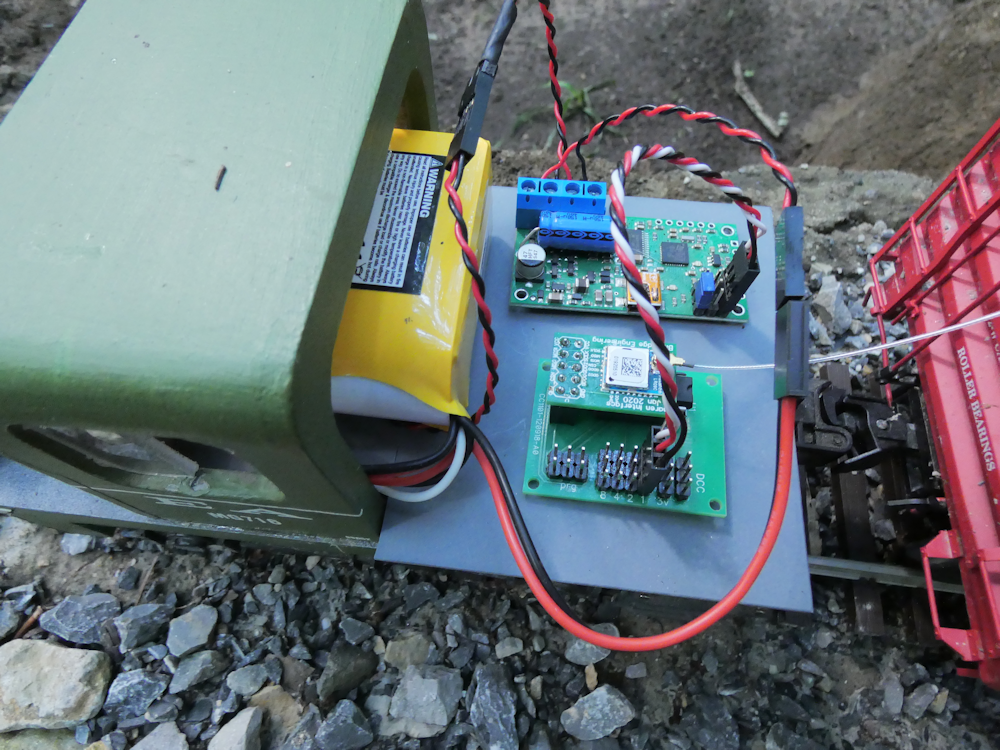

This is a project I actually started about 2 years ago. I put it on the back burner when I got involved with Protothrottle development and it has languished in my electronics stash until the last few weeks. This is an Attiny driven Airwire Compatible Receiver. The board in the photos above is a development board, and as such has a few jumpers and mods on the underside. The production board will be quite a bit smaller and more compact (and no cuts or jumpers!).
I’m using an Anaren daughterboard for the radio modem, this is made by my colleague, Darrell Lamm, who has done a tremendous amount of R & D on these CC1101 radio modems and chipsets. These are really nice boards. They are also quite small and so perfect for this design.
I have taken the functionality of my Protothrottle and original AirMini Receiver designs, optimized the code and squeezed it down to a very small footprint. Although this is still in the test phase, I am quite happy with the results.
This board has the following features:
- Compatible with the T5000 Airwire Transmitter
- Compact size – 26mm x 34mm
- Programmable using CVs
- DCC Output up to 10A (with optional motor drivers)
- Two digital output lines that can drive relays, etc, assignable to any function code 0-28
- Two Servo Outputs that can be used in three ways:
- Live Steam Mode – servo one follows the throttle, servo two is direction
- Electronic Speed Control Mode – Servo one controls a ‘center off’ ESC
- Coupler Mode – Trigger two servo controlled couplers
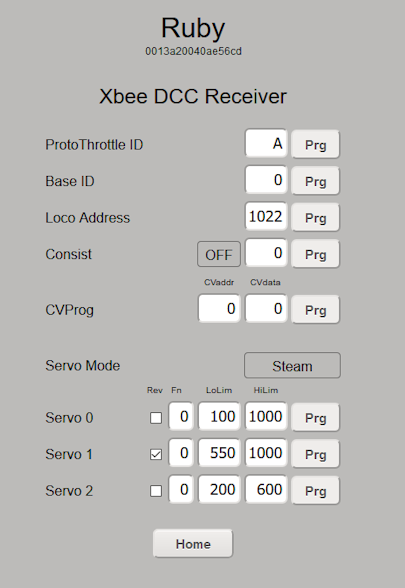
Here is a list of all of the programmable options for this receiver:
/* * Decode message packets here and do servos and config variables * * CV 200 - Radio Channel 0-15 * CV 201 - Radio Power Code * CV 202 - DCC Address lo * CV 203 - DCC Address hi * CV 204 - Servo Mode 0=Steam, 1=couplers, 2=ESC * CV 205 - Servo0 LowLimit Lo * CV 206 - Servo0 LowLimit Hi * CV 207 - Servo0 HighLimit Lo * CV 208 - Servo0 HighLimit Hi * CV 209 - Servo1 LowLimit Lo * CV 210 - Servo1 LowLimit Hi * CV 211 - Servo1 HighLimit Lo * CV 212 - Servo1 HighLimit Hi * CV 213 - Function Code for Output x * CV 214 - Function Code for Output y * CV 215 - On/Off Code for Output x * CV 216 - On/Off Code for Output y */
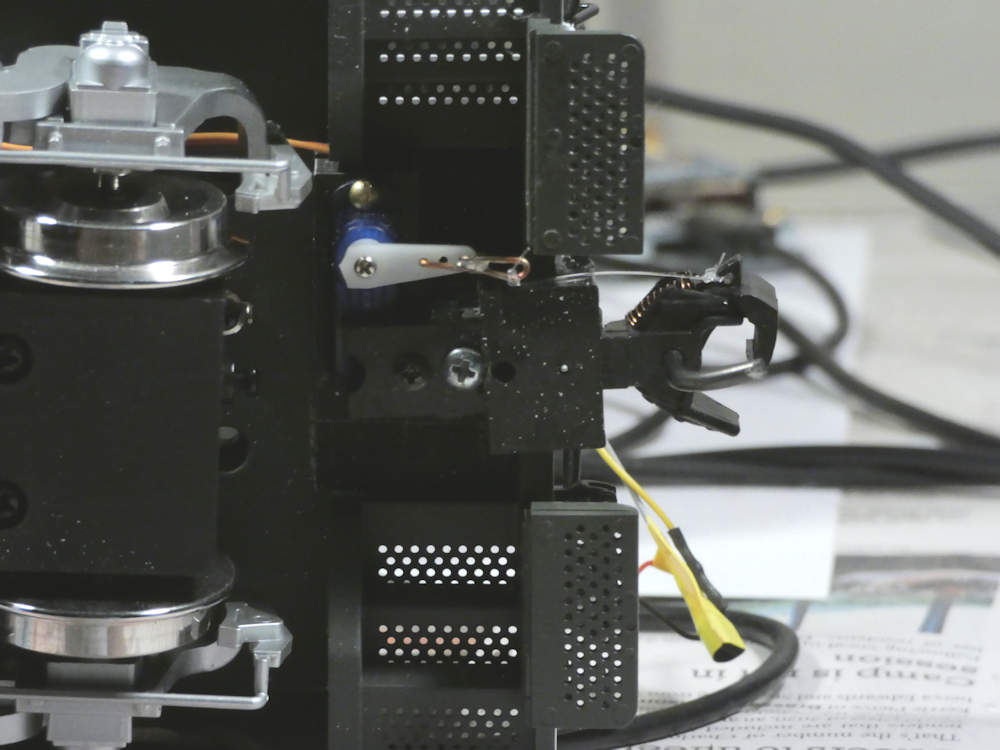
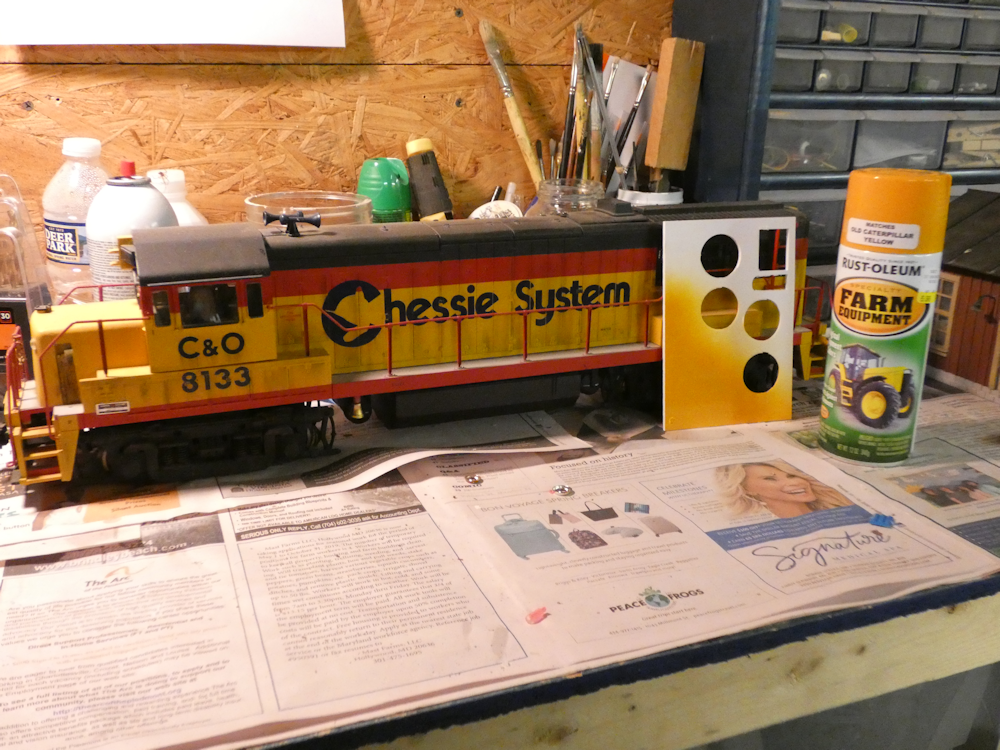
In the pictures and video, I’m controlling a Pololu 18v7 ESC motor controller. The Pololu has an option for a 3.3v BEC (battery elimination circuit) so it only takes two boards and a 2 cell lipo (7.4v) battery to drive my little test critter. I took it out to the layout to do some range testing and was quite impressed. With the T5000 set to transmit power ’10’ (full) I am getting a good solid 100ft. It may actually be a bit more but this is as far as I could go easily. Below is a video of the range test:
And a more close up video: